5 Modelagem em Séries Temporais
5.1 O que são os Modelos Box & Jenkins
A abordagem de Box-Jenkins para a modelagem dos processos ARIMA foi descrita num livro publicado por George Box e Gwilym Jenkins em 1970.
BOX, G.E.P. and G.M. JENKINS (1970)
Time series analysis: Forecasting and control, San Francisco: Holden-Day.O método criado por Box & Jenkins envolve a identificação de um processo ARIMA (modelos autorregressivos, integrados e de médias móveis) adequado, ajustando-o aos dados e, uma vez ajustados permite também utilizar esses modelos para a descrição e/ou previsão (forecast).
Uma das características atraentes da abordagem Box-Jenkins é que os processos ARIMA são uma classe muito rica de modelos e geralmente é possível encontrar um modelo que forneça uma descrição adequada dos dados. Ajustam simultaneamente tendência, sazonalidade, ciclicidade e estrutura de dependência serial.
A dependência serial é a influência que um dado evento no tempo recebe de pontos anteriores.
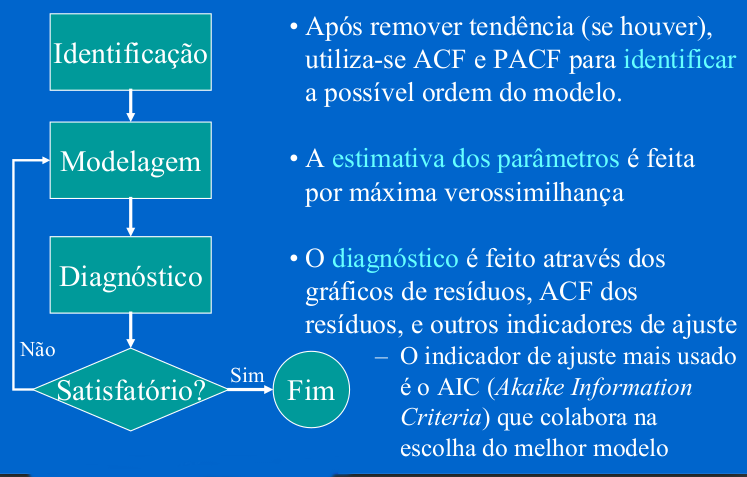
O processo de modelagem B&J é feito em um ciclo iterativo de 3 estágios (repetido até o ajuste do modelo mais adequado):
Identificação - análise exploratória, baseada em gráficos dos dados brutos, autocorrelação, autocorrelação parcial, buscando identificar o tipo de modelo + adequado;
Estimação - estimativa de termos e parâmetros e seleção do “melhor modelo”;
Diagnóstico - critérios de ajuste, parcimônia.
5.2 Alguns processos estocásticos
- Processo aleatório (ruido branco): sequência de variáveis aleatórias (\(a_t\)) que são mutuamente independentes e identicamente distribuídas. Possui média e variância constantes e os coeficientes de autocorrelação são iguais a:
\[ \rho_{h} = \left\{ \begin{array}{rc} 1, &\mbox{se} \quad h = 0, \\ 0 , &\mbox{se} \quad h = \pm 1, \pm 2, ... \end{array}\right.\]
Passeio aleatório (random walk): Denomina-se passeio aleatório quando a variável aleatória \(Z_t\) é igual à \(Z_{t-1}\) mais um erro aleatório \(\rightarrow\) \(Z_t = Z_{t-1} + a_t\).
- Quando \(t = 0 \rightarrow Z_1 = a_1\), logo \[Z_t = \sum_{t}^{i=1} a_i\]
5.3 Modelo ARIMA
Na análise de séries temporais, um Modelo Autorregressivo Integrado de Médias Móveis (Autoregressive Integrated Moving Average ou ARIMA, na sigla em inglês) é uma generalização de um Modelo Autorregressivo de Médias Móveis (ARMA). Ambos os modelos são ajustados aos dados da série temporal para entender melhor os dados ou para prever pontos futuros na série. Modelos ARIMA são aplicados em alguns casos em que os dados mostram evidências de não estacionariedade, em que um passo inicial de diferenciação (correspondente à parte “integrada” do modelo) pode ser aplicado uma ou mais vezes para eliminar a não estacionariedade.
Temos então:
AR (Autorregressivo): avalia a relação entre os períodos (lags) através da autocorrelação, ou seja, indica que a variável de interesse é “regressada” em seus próprios valores defasados, isto é, anteriores. O objetivo de desse modelo e extrair essa influência.
I (Integrated): Aplica a diferenciação, se necessária, ou seja, indica que os valores de dados foram substituídos com a diferença entre seus valores. E os valores anteriores e este processo diferenciador pode ter sido realizado mais de uma vez.
MA (Moving Average): Indica que o erro de regressão é na verdade uma combinação linear dos termos de erro, cujos valores ocorreram contemporaneamente e em vários momentos no passado, ou seja, avalia os erros entre períodos e extrai estes erros (não tem relação com MA usados para suavização da ST).
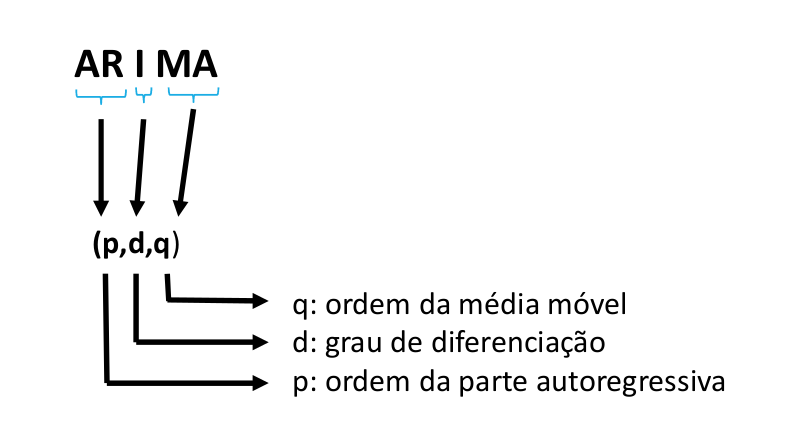
p é a ordem (número de defasagens) do modelo autorregressivo;
d é o grau de diferenciação (o número de vezes em que os dados tiveram valores passados subtraídos);
q é a ordem do modelo de média móvel.
Exemplos:
| Parâmetro | Descrição |
|---|---|
| \(p = 1\) | Significa que uma determinada observação pode ser explicada pela observação prévia + erro |
| \(p = 2\) | Significa que uma determinada observação pode ser explicada por duas observações prévias + erro |
| \(d = 0\) | Significa que não é aplicada a diferenciação |
| \(d = 1\) | Significa que será aplicada diferenciação de primeira ordem |
| \(d = 2\) | Significa que será aplicada diferenciação de segunda ordem |
| \(q = 1\) | Significa que uma determinada observação pode ser explicada pelo erro da observação prévia |
| \(q = 2\) | Significa que uma determinada observação pode ser explicada pelo erro de duas observações prévias |
| ARIMA | Descrição |
|---|---|
| AR(1) ou ARIMA(1,0,0) | Apenas elemento autorregressivo, de \(1^{a}\) ordem |
| AR(2) ou ARIMA(2,0,0) | Apenas elemento autorregressivo, de \(2^{a}\) ordem |
| MA(1) ou ARIMA(0,0,1) | Apenas Média Móvel |
| ARMA(1,1) | Autorregressão e média móvel de \(1^{a}\) ordem |
5.3.1 Modelo Autorregressivo de ordem p - AR(p) ou ARIMA(p,0,0)
Supondo que a variável aleatória \(Z_t\) é linearmente correlacionada com seus próprios valores defasados, este é um modelo autorregressivo geral de ordem p.
\[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + ... + \phi_p Z_{t-p} + a_t\], sendo \(t=1,2,...,p\).
O objetivo é estimar:
a constante c - média do processo ou intercepto
a ordem p do modelo - até onde vai a dependência
os parâmetros \(\phi\) de cada termo - peso de cada ponto passado na determinação do ponto t
Para estimar os parâmetros \(\phi\) de um AR, a estacionariedade de \(1^a\) e \(2^a\) ordens são fundamentais !!!
| Processo | Modelo |
|---|---|
| AR(1) | \[Z_t = c + \phi_1 Z_{t-1} + a_t\] |
| AR(2) | \[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + a_t\] |
| \(\dots\) | \(\dots\) |
| AR(p) | \[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + ... + \phi_p Z_{t-p} + a_t\] |
5.3.2 Condições de estacionariedade
Uma série é estacionária quando suas propriedades não variam ao longo do tempo. Em um processo AR, a estacionariedade se reflete na estimação dos parâmetros:
No caso AR(1) basta que \(|\phi_1| < 1\) para que o processo seja estacionário.
No caso AR(2):
\(|\phi_2|< 1\)
\(\phi_2 + \phi_1 < 1\)
\(\phi_2 - \phi_1 < 1\)
5.3.3 Modelo de Médias Móveis de ordem q - MA(q) ou ARIMA(0,0,q)
Independente do processo autorregressivo, cada elemento da série pode também ser afetado pelo erro passado - processo “Médias Móveis”. Neste caso, o valor de \(Z_t\) depende de valores do componente aleatório em pontos anteriores (usa-se a denominação choque aleatório).
\[Z_t = C + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2} - ... - \theta_p a_{t-q}\]
Por convenção os termos em a são escritos com sinais negativos.
Cada observação é a soma de um componente aleatório \(a_t\) e uma combinação dos componentes aleatórios anteriores.
O modelo pode ser escrito baseado nas defasagens (informações passadas) do ruído branco.
| Processo | Modelo |
|---|---|
| MA(1) | \[Z_t = c + a_t - \theta_1 a_{t-1}\] |
| MA(2) | \[Z_t = c + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2}\] |
| \(\dots\) | \(\dots\) |
| MA(q) | \[Z_t = c + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2} - ... - \theta_p a_{t-q} + a_t\] |
5.3.4 Condições de invertibilidade
No modelo MA não há restrição sobre os \(\theta\)’s para que o processo seja estacionário, mas é necessário garantir a invertibilidade.
Existe uma dualidade entre processos médias móveis e autorregressivo, onde a equação de MA pode ser reescrita na forma AR (de ordem infinita). Se isso for possível, podemos dizer que o processo é invertível, ou seja, se puder utilizar um AR(p) para explicar um MA(q).
Mas, para isso algumas condições devem ser satisfeitas:
No caso MA(1) basta que \(|\theta| < 1\) para que o processo é invertível.
No caso MA(2):
\(|\theta_2|< 1\)
\(\theta_2 + \theta_1 < 1\)
\(\theta_2 - \theta_1 < 1\)
5.3.5 Modelo Autorregressivo de Médias Móveis de ordem p e q - ARMA(p,q) ou ARIMA(p,0,q)
A importância de um modelo ARMA está no fato de poder descrever uma série estacionária por um modelo que envolve menos parâmetros que um MA puro ou um AR puro.
\[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + ... + \phi_p Z_{t-p} + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2} - ... - \theta_p a_{t-q}\]
Cada observação é definida por combinação linear de observações anteriores e combinação de componentes aleatórios anteriores.
Neste modelo misto, as duas condições - estacionariedade e invertibilidade - são necessárias.
| Processo | Modelo |
|---|---|
| ARMA(1,1) | \[Z_t = c + \phi_1 Z_{t-1} + a_t - \theta_1 a_{t-1}\] |
| ARMA(2,2) | \[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2}\] |
| \(\dots\) | \(\dots\) |
| ARMA(p,q) | \[Z_t = c + \phi_1 Z_{t-1} + \phi_2 Z_{t-2} + ... + \phi_p Z_{t-p} + a_t - \theta_1 a_{t-1} - \theta_2 a_{t-2} - ... - \theta_p a_{t-q}\] |
- No caso ARMA(1,1), o processo será estacionário se \(|\phi_1| < 1\) e \(|\theta_1| < 1\), respectivamente.
5.3.6 Modelo Autorregressivo Integrado de Médias Móveis de ordem p, d e q - ARIMA(p,d,q)
Neste modelo se utiliza o método de diferenças para obter a estacionariedade da série. Também chamado de operador de deslocamento (backshift).
\[W_t = \bigtriangledown Z_t = (1-B)Z_t = Z_t - Z_{t-1}\]
O modelo então passa a ser:
\[W_t = \phi_1 W_{t-1} + ... + \phi_p W_{t-p} + a_t - \theta_1 a_{t-1} - ... - \theta_q a_{t-q}\]
\[\phi(B)W_t = \theta(B)a_t\]
\[\phi(B)(1-B)^d Z_t = \theta(B)a_t\]
Assim, se a série for estacionária, podemos representá-la por um modelo ARMA(p,q).
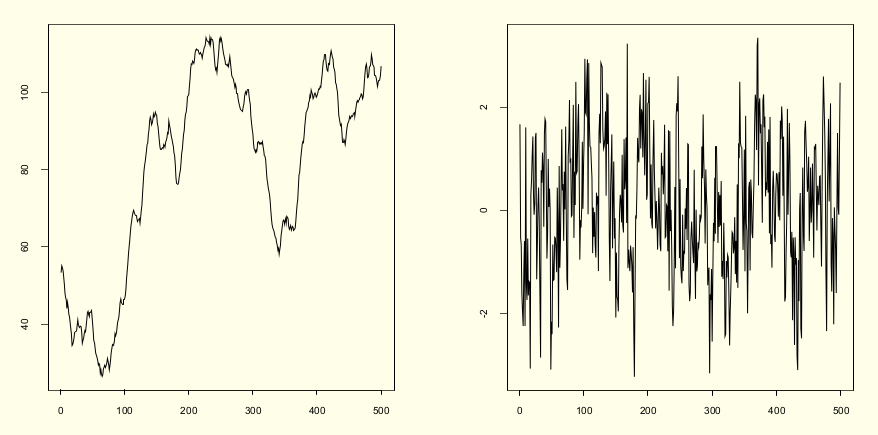
A figura abaixo mostra a série não estacionária antes e após diferenciação - \(d(1)\)
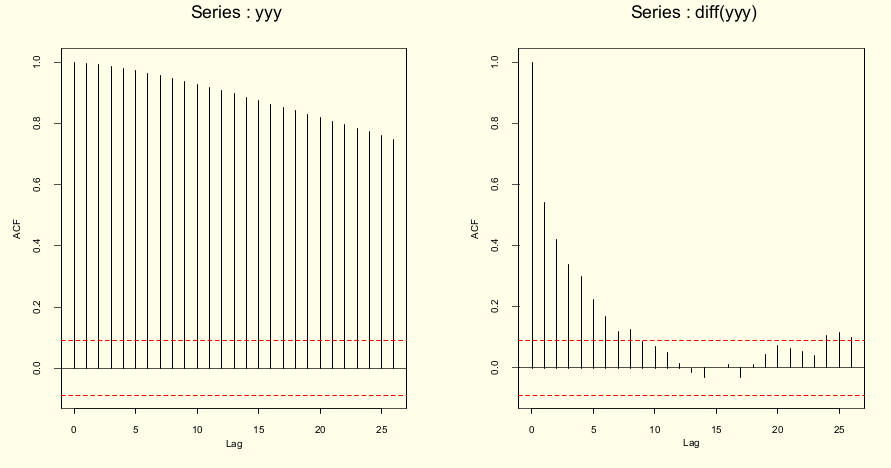
A figura abaixo mostra a ACF antes e após a diferenciação:
5.3.7 Resumo - Modelos ARIMA não sazonais
Resumindo, os modelos ARIMA não sazonais são geralmente denotados como ARIMA(p,d,q), em que os parâmetros p,d,q são números inteiros não negativos.
Robusto: Pode ser usado em praticamente qualquer tipo de ST
Dados estáveis, com poucos outliers
Requer dados estacionários: pode ser transformada usando diferenciação: remove tendências
Subtrai a observação do período atual do período anterior
A diferenciação pode ser feita 1x: diferenciação de primeira ordem
Ou pode ser necessário uma segunda vez: diferenciação de segunda ordem (mais raro)
5.4 Modelos ARIMA sazonais (SARIMA) - \(ARIMA(p,d,q)(P,D,Q)_m\)
- Em epidemiologia é comum observar sazonalidadenos dados. Ou seja, considerando medidas mensais, pode-se esperar que a série dependa também dos termos \(Z_{t-12}\) e talvez \(Z_{t-24}\).
\[\phi(B) \Phi(B^s)\bigtriangledown_{s}^{D} \bigtriangledown^{d}Z_t = C + \theta(B) \Theta(B^s) a_t\]
| \(\phi(B) \Phi(B^s)\bigtriangledown_{s}^{D} \bigtriangledown^{d}Z_t\) | \(C + \theta(B) \Theta(B^s) a_t\) |
|---|---|
| AR(p) backshift x AR(P) sazonal backshift sazonal x diferenciação sazonal x diferenciação x tendência \(Z_t\) | Média do processo + MA(q) backshift x MA(Q) sazonal backshift sazonal x erro aleatório |
São geralmente denotados como \(ARIMA(p,d,q)(P,D,Q)_{m}\), em que:
m se refere ao número de períodos em cada temporada;
P, D e Q se referem aos termos de autorregressão, diferenciação e média móvel para a parte sazonal do modelo ARIMA.
5.5 Função de Autocorrelação Parcial (FACP) - (Partial Autocorrelation Function - PACF)
A correlação medida diretamente em \(t-1\), \(t-2\) até \(t-p\) é a função de autocorrelação.
Uma outra ferramenta utilizada no processo de identificação do modelo é a Função de Autocorrelação Parcial (FACP). Esta medida corresponde a correlação de \(Z_t\) e \(Z_{t-h}\) removendo o efeito dos pontos intermediários \(Z_{t-1}, Z_{t-2}, \dots , Z_{t-h+1}\) e é denotada por \(\rho_{h}\).
Ou seja, PACF é a correlação da série temporal com um atraso de si mesmo porém com a dependência linear de todos os desfasamentos entre eles removidos.
\[\rho_{kk} = Corr(X_t, X_{t-l}|X_{t-1}, X_{t-2},\dots,X_{t-h+1})\]
Segue abaixo um exemplo um exemplo de ACF, com já vimos anteriormente, e do PACF. Observe que há duas linhas horizontais que representam os limites do teste de significância sendo que valores acima ou abaixo da linha são estatisticamente significantes.
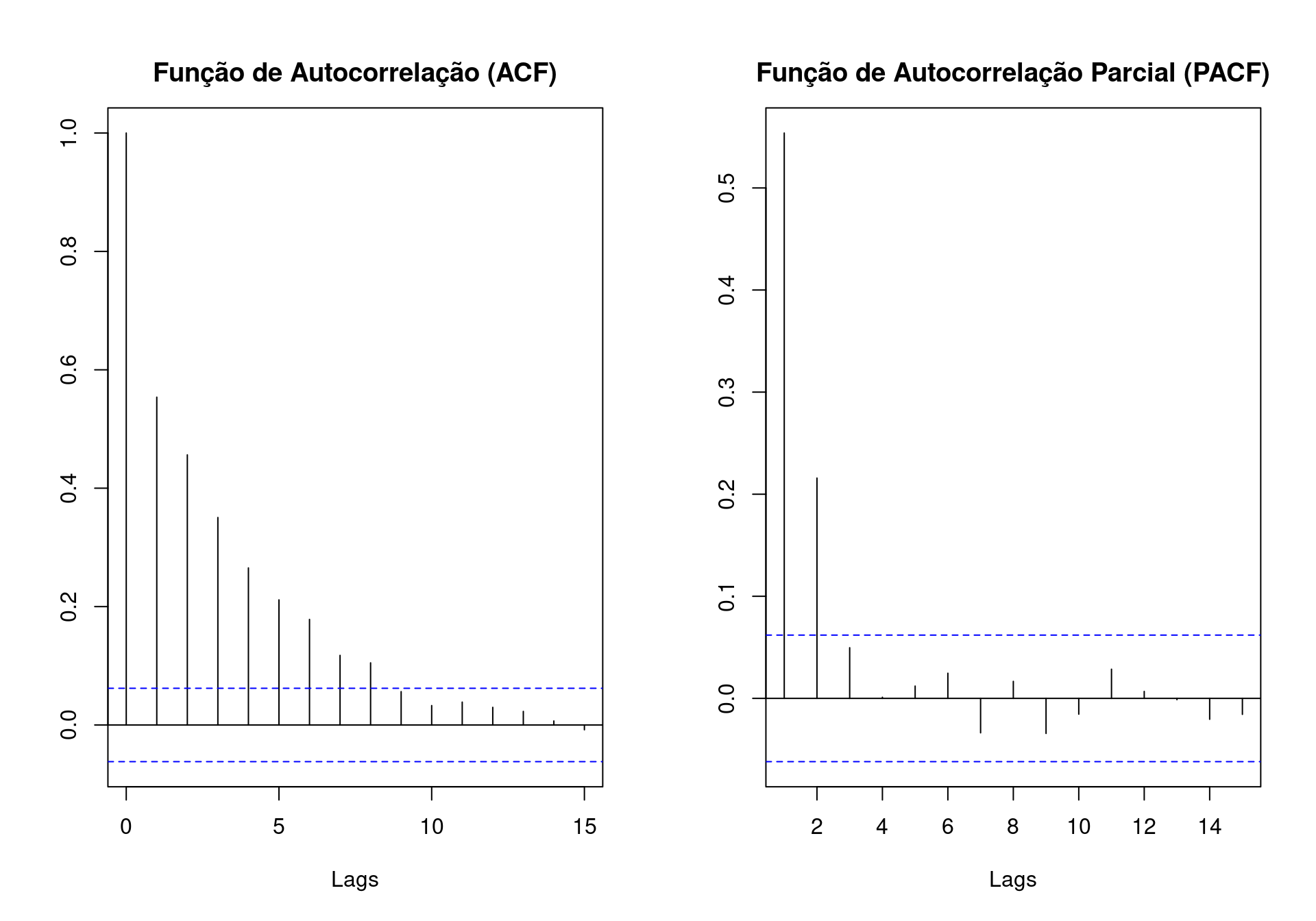
No \(lag = 1\), a ACF e a PACF são iguais.
Na PACF somente existe correlação até o lag igual a ordem do modelo AR - ex: modelo de ordem 3 somente apresenta valores de PACF até o \(3^o\) lag.
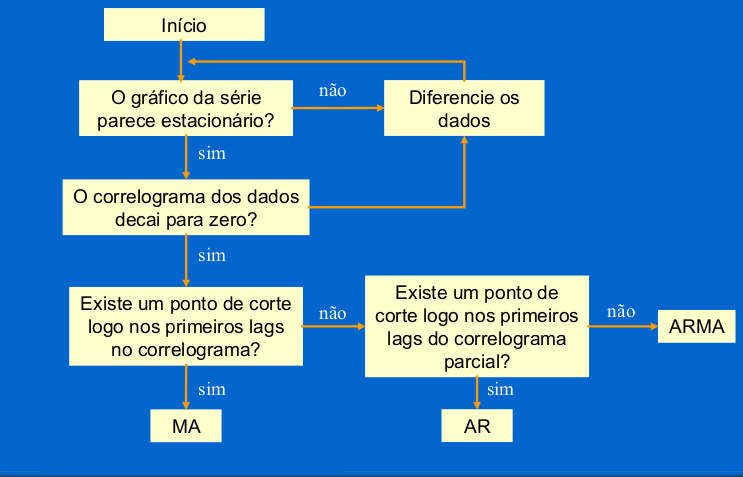
As formas gráficas do ACF e PACF servem para definir valores de p e q. Olhando para os correlogramas, podemos determinar que tipo de modelo selecionar e quais serão os valores de p, d e q.
| Modelo | Padrão do ACF | Padrão do PACF |
|---|---|---|
| AR(p) | Decaimento exponencial ou padrão de onda senoidal amortecida ou ambos | Picos significantes através de primeiros lags |
| MA(q) | Picos significantes através de primeiros lags | Decaimento exponencial ou padrão em forma de senoides |
| ARMA(1,1) | Decaimento exponencial a partir do lag 1 | Decaimento exponencial a partir do lag 1 |
| ARMA(p,q) | Decaimento exponencial | Decaimento exponencial |
5.6 Processo de Modelagem
Para a construção do modelo podemos seguir o seguinte roteiro no qual a escolha da estrutura do modelo é baseado nos próprios dados:
Identifica-se um modelo com base na análise de autocorrelações, autocorrelações parciais e outros critérios;
Estima-se os parâmetros do modelo identificado;
Verifica-se se o modelo ajustado é adequado aos dados através de uma análise de resíduos.
Caso o modelo não seja adequado o roteiro é repetido, voltando à fase de identificação do modelo.
Como definir valores de p, d e q ?
p: ordem da parte autoregressiva – PACF
d: grau de diferenciação – Teste de Estacionariedade
q: ordem da média móvel – ACF
5.7 Processo de Identificação
Esse processo pode ser extremamente difícil, mesmo para experientes. E nem sempre o modelo mais sugestivo é o melhor.
Existem vários critérios para identificação de um modelo, por isso, é possível identificar modelos diferentes dependendo do critério que foi escolhido para identificação.
Testar todas as combinações possíveis dos parâmetros \(p,d,q\) do modelo ARIMA seria uma boa ideia, mas isso pode ser um pouco demorado se for feito de forma manual.
5.7.1 Simulando os dados das ST com estruturas ARIMA
Simulando um processo AR(1)
# Simulando 100 observações através de um processo AR(1) com média 30
ar.sim<-arima.sim(model=list(ar=.9),n=200, mean = 30)
# Construindo o gráfico de ST
ts.plot(ar.sim)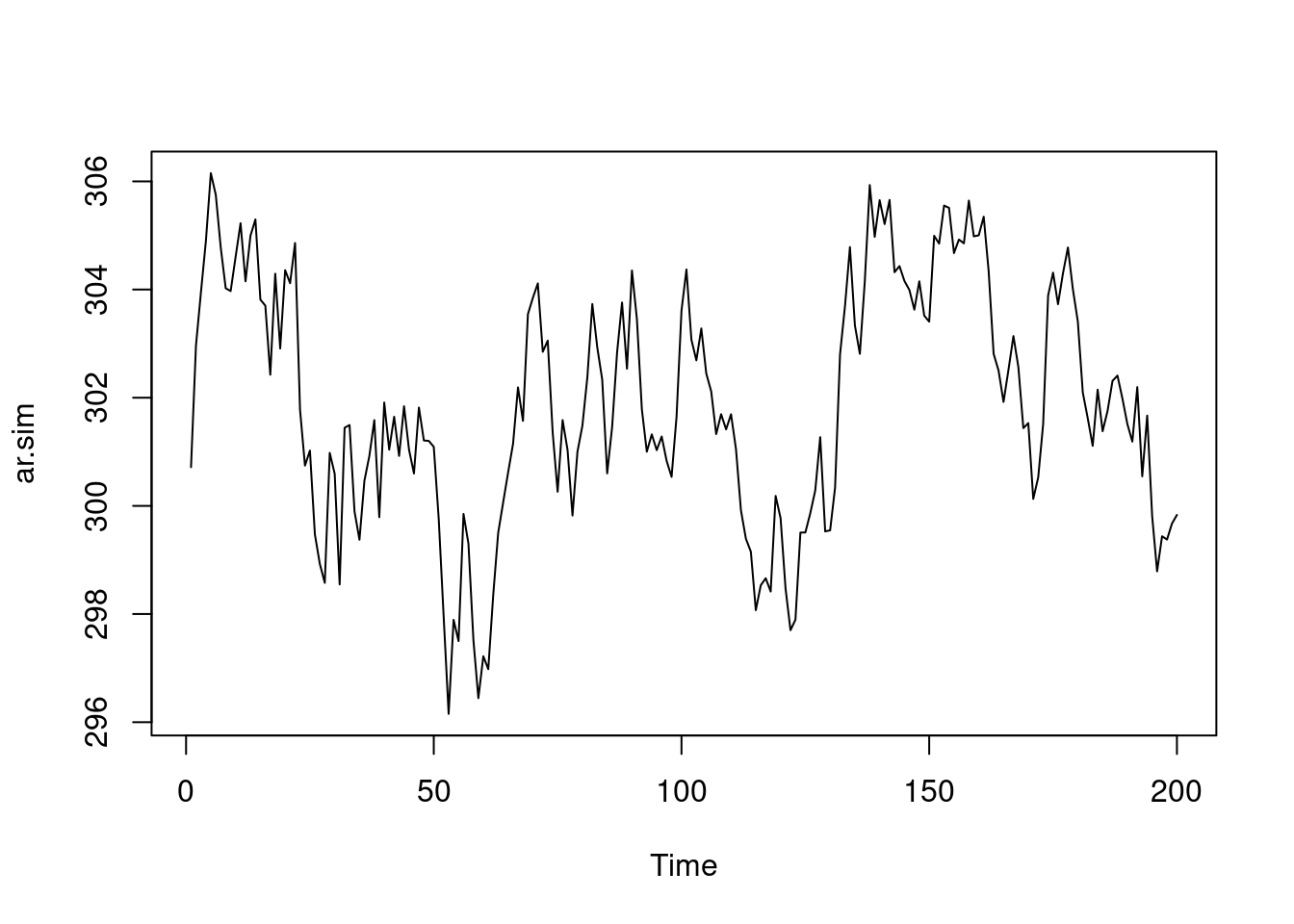
# ACF e PACF
par(mfrow=c(1,2))
ar.acf <- acf(ar.sim,type="correlation",plot=T)
ar.pacf <- acf(ar.sim,type="partial",plot=T)
plot(ar.acf)
plot(ar.pacf)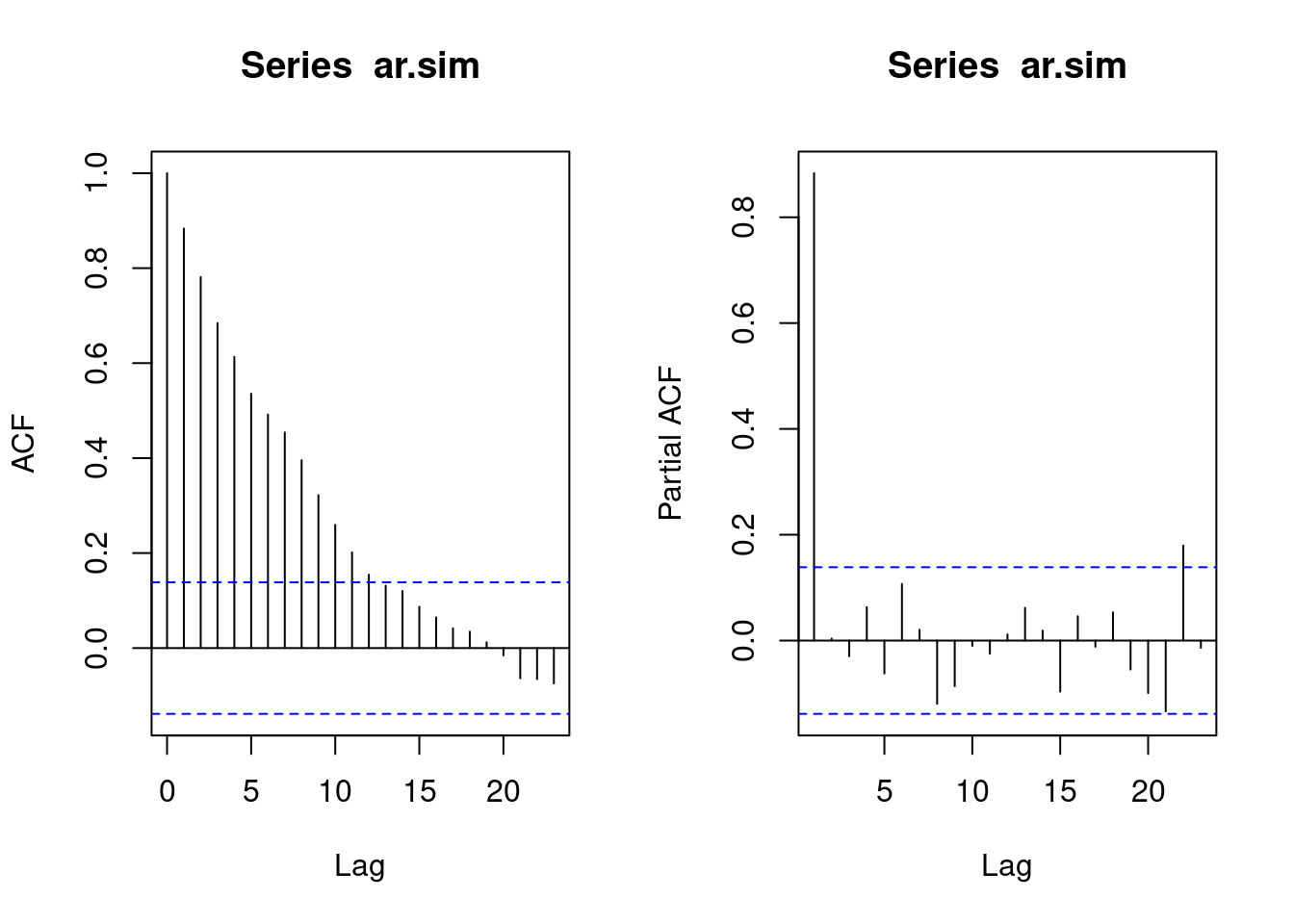
Simulando um processo AR(2)
# Simulando 100 observações através de um processo AR(2) com média 30
ar.sim <- arima.sim(model=list(ar=c(.9,-.2)),n=200, mean = 30)
# Construindo o gráfico de ST
ts.plot(ar.sim)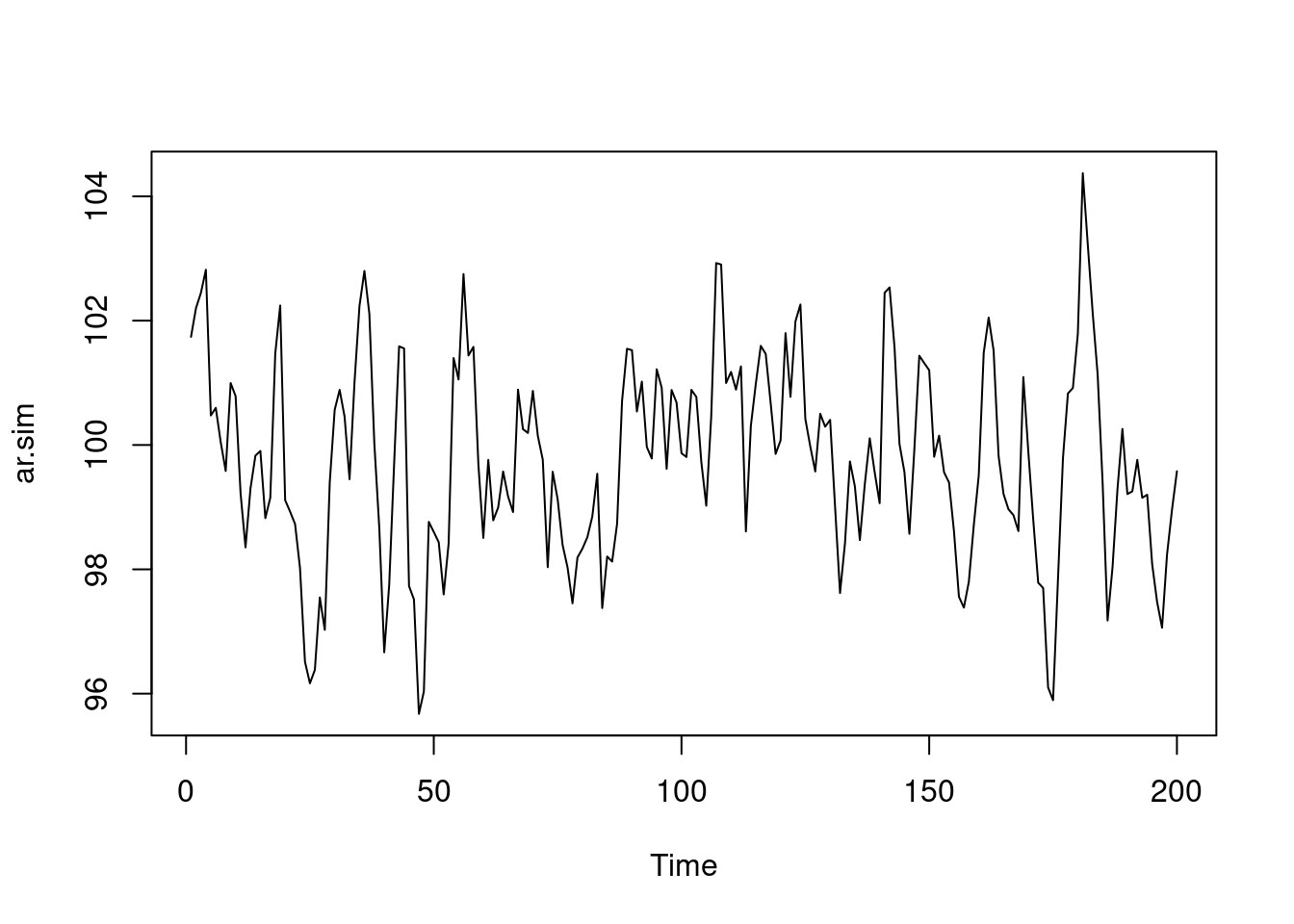
# ACF e PACF
par(mfrow=c(1,2))
ar.acf <- acf(ar.sim,type="correlation",plot=T)
ar.pacf <- acf(ar.sim,type="partial",plot=T)
plot(ar.acf)
plot(ar.pacf)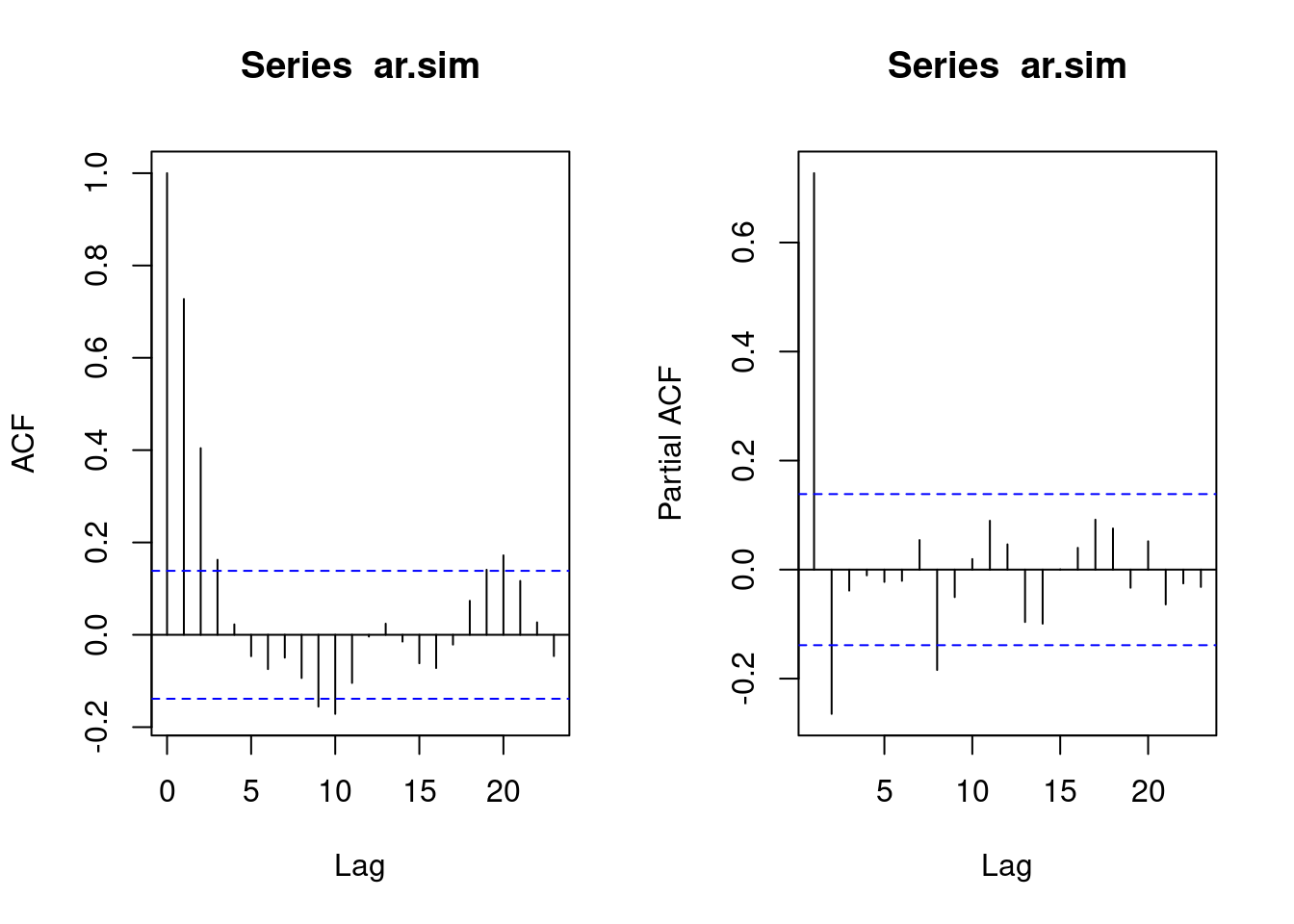
Simulando um processo MA(2)
# Simulando 200 observações através de um processo MA(2) com média 30
ma.sim <- arima.sim(model=list(ma=c(-.7,.1)),n=200, mean = 30)
# Construindo o gráfico de ST
ts.plot(ma.sim)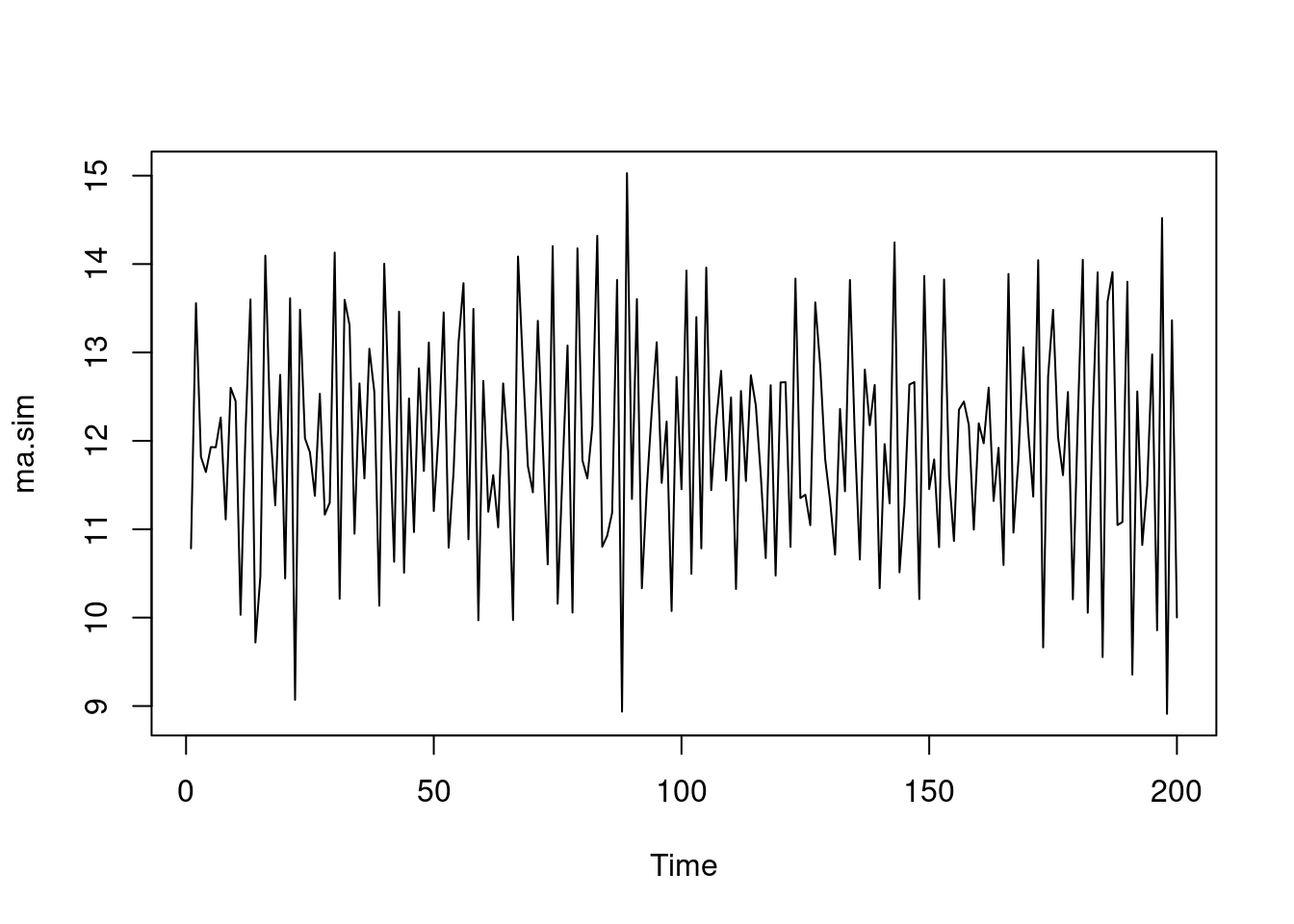
# ACF e PACF
par(mfrow=c(1,2))
ma.acf <- acf(ma.sim,type="correlation",plot=T)
ma.pacf <- acf(ma.sim,type="partial",plot=T)
plot(ma.acf)
plot(ma.pacf)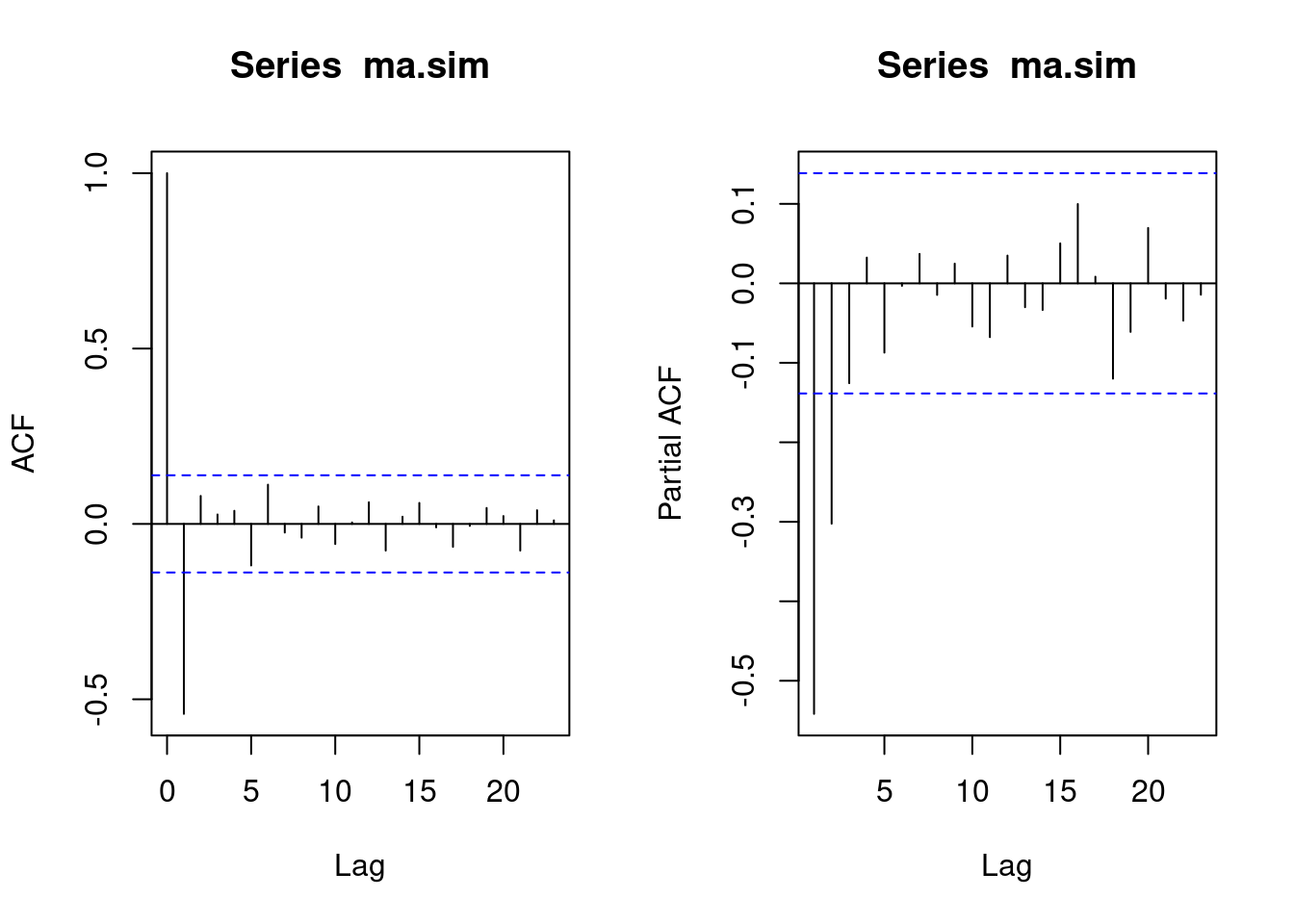
Simulando um processo ARMA(2,2)
# Simulando 200 observações através de um processo ARMA(2,2) com média 30
arma.sim <-arima.sim(model=list(ar=c(.9,-.2),ma=c(-.7,.1)),n=200, mean = 30)
# Construindo o gráfico de ST
ts.plot(arma.sim)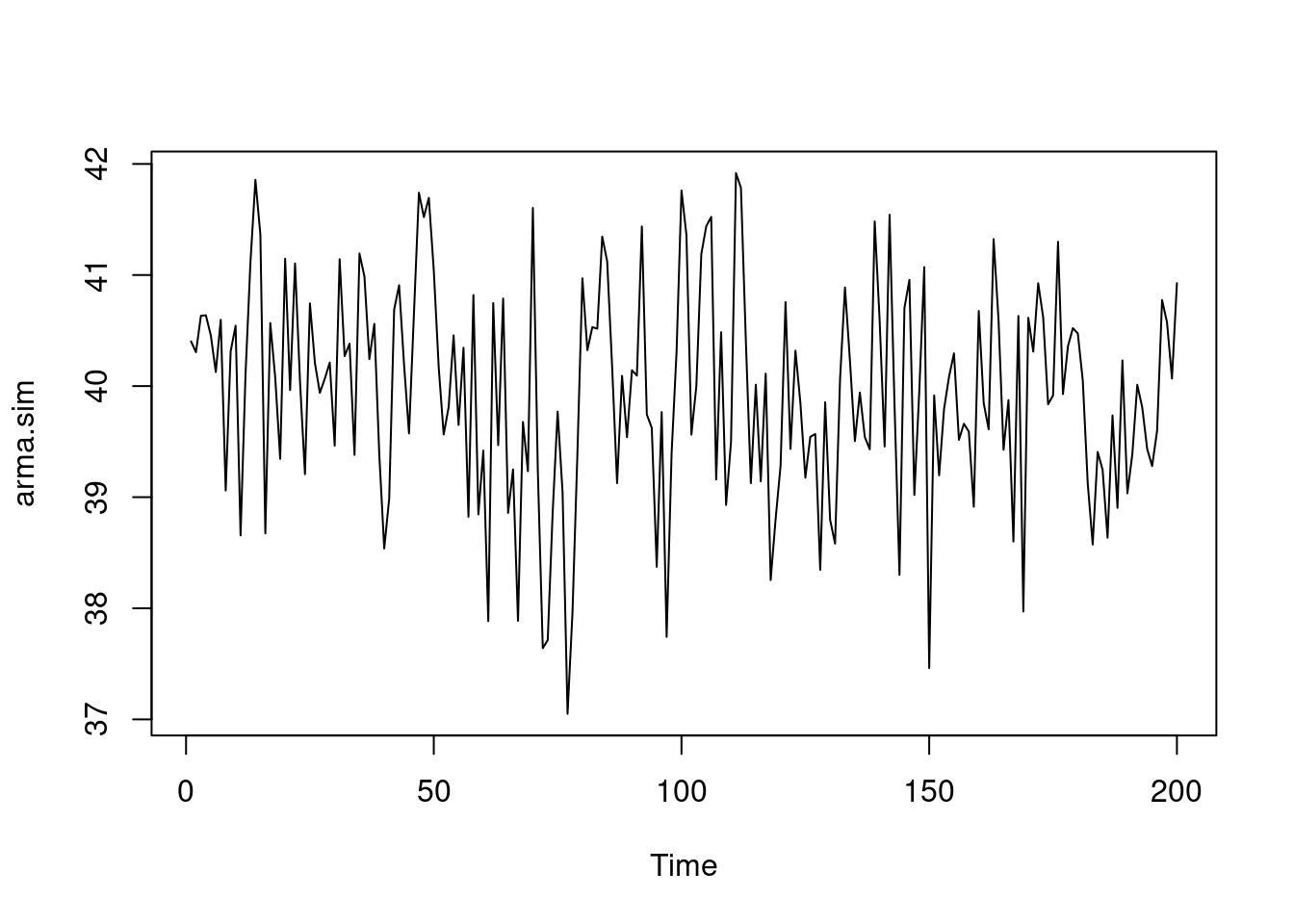
# ACF e PACF
par(mfrow=c(1,2))
arma.acf <- acf(arma.sim,type="correlation",plot=T)
arma.pacf <- acf(arma.sim,type="partial",plot=T)
plot(arma.acf)
plot(arma.pacf)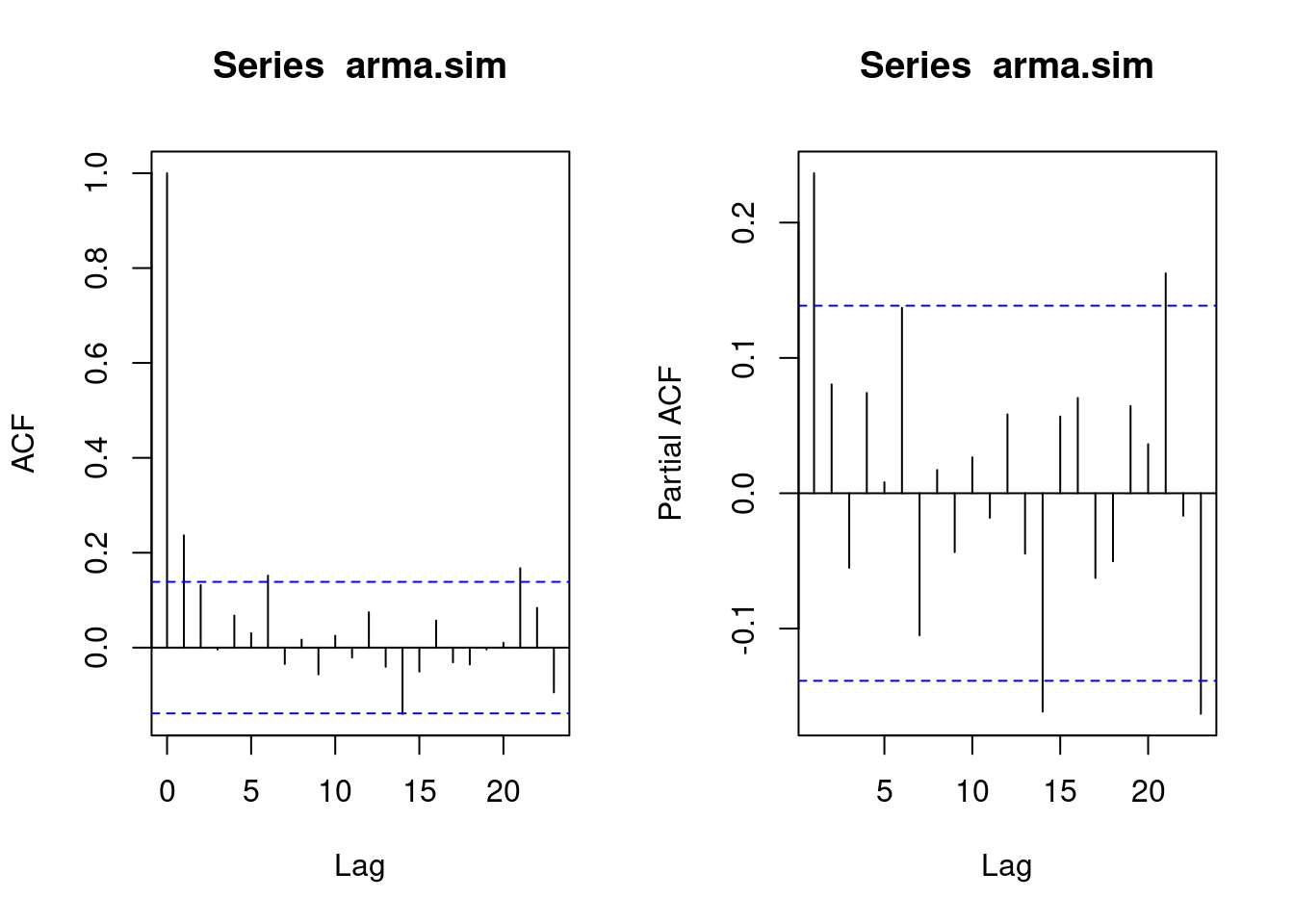
5.8 Métricas para avaliar a qualidade do ajuste
- Para determinar a ordem de um modelo ARIMA não sazonal, um critério útil é o critério de informação de Akaike (AIC).
\[AIC = - 2log(L) + 2(p+q+k+1)\]
em que L é verossimilhança dos dados, p é a ordem da parte autoregressiva e q é a ordem da parte de média móvel. O parâmetro k neste critério é definido como o número de parâmetros no modelo sendo ajustado aos dados.
- O AIC corrigido para modelos ARIMA (AICc) pode ser escrito como:
\[AICc = AIC + \dfrac{2(p+q+k+1)(p+q+k+2)}{T-p-q-k-2}\]
O critério de informação bayesiano (BIC) pode ser escrito como:
\[BIC = AIC + (log(n) - 2) (p+q+k+1)\]
O objetivo é o minimizar os valores de AIC, AICc e BIC para um bom modelo. Quanto menor o valor de um destes critérios para uma gama de modelos investigados, melhor o modelo se adequará aos dados.
O AICc pode ser usado apenas para comparar modelos ARIMA com as mesmas ordens de diferenciação. Para modelos ARIMA como ordens distintas de diferenciação, a raiz do erro quadrático médio pode ser usada para comparação de modelos.
A abordagem do BIC penaliza mais intensamente os modelos por levar em consideração o \(n\).
5.9 Análise de Resíduos
Se o modelo está correto, as nossas suposições iniciais feitas para os resíduos devem ser satisfeitas, isto é, \(a_t \sim N(0, \sigma^{2}_{a})\) e independentes.
Assim, a análise de resíduos é feita da seguinte forma:
Faz-se um gráfico da série \(a_t\) e observa-se a sua estacionariedade e se sua média é igual a zero (aproximadamente).
Se a série \(a_t\) for estacionária, calcula-se suas funções de autocorrelação e autocorrelação parcial amostral;
Se as funções em (2) indicarem que o processo gerador de \(a_t\) é um ruído branco, o modelo escolhido para \(Y_t\) poderá ser ser considerado adequado. Senão, podemos utilizar a análise dos resíduos para identificar outro modelo para a série.
Lembrando que o processo \(a_t\) é um ruído branco se:
\(E(a_t) = 0\),
\(a_t \sim N(0, \sigma^2_a)\),
\(Cov(a_t, a_{t-h}) = 0\), \(\forall h \neq 0\) (Não correlacionados)
5.10 Ajuste manual de modelo ARIMA
library(forecast)
ggtsdisplay(ldeaths)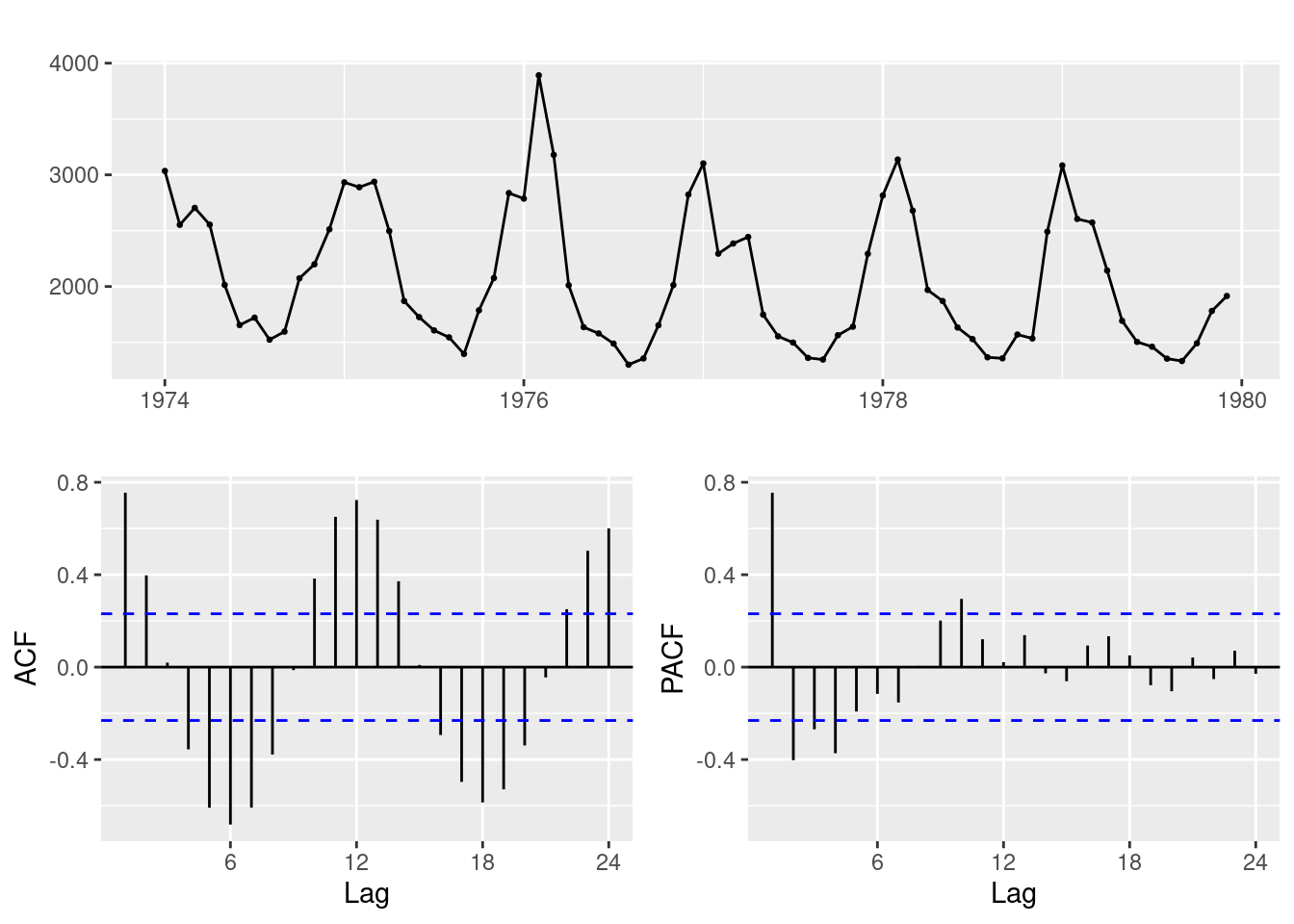
modelo0 <- Arima(ldeaths,order = c(1,0,0),seasonal = c(1,1,1))
checkresiduals(modelo0)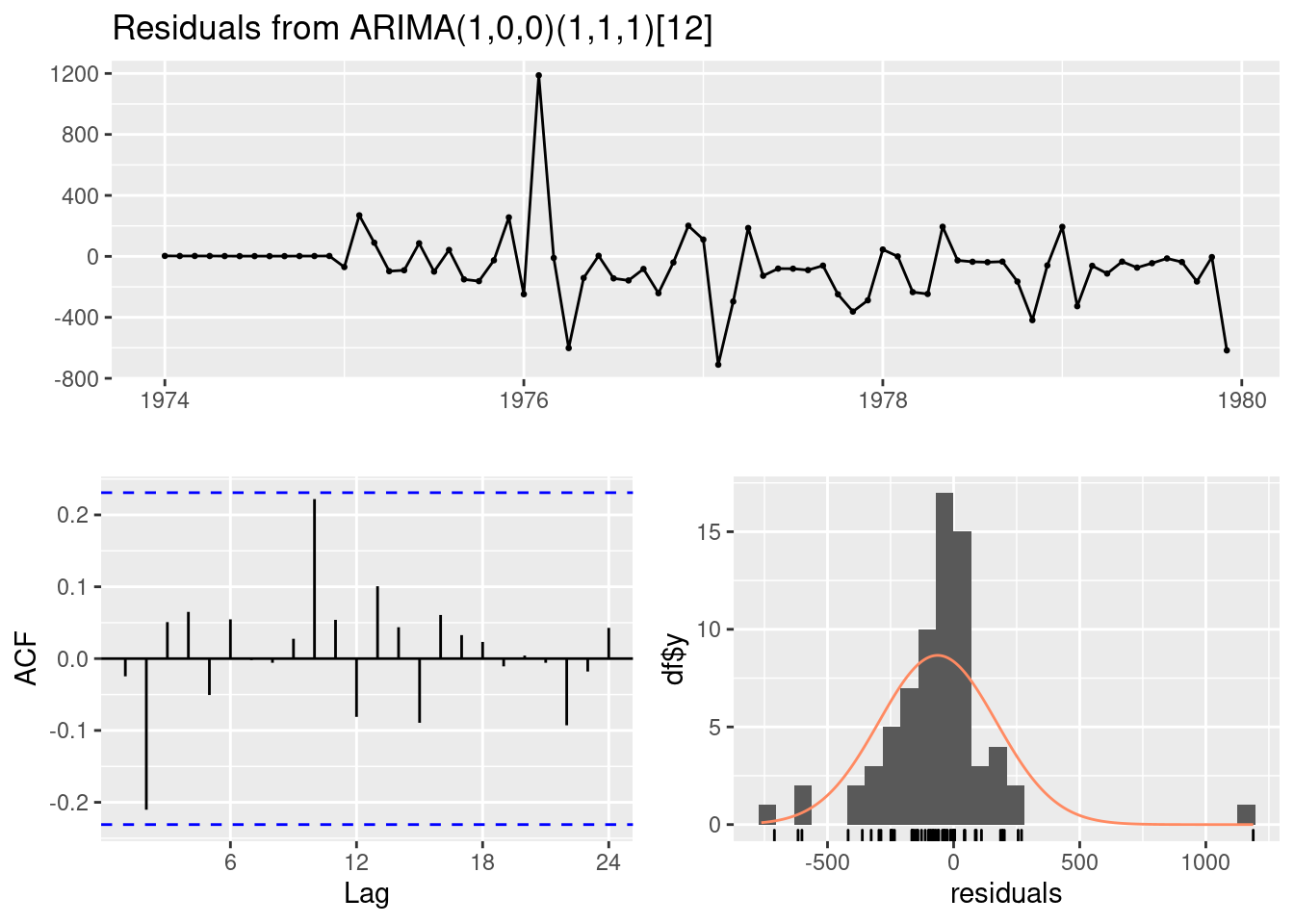 Ljung-Box test
Ljung-Box test
data: Residuals from ARIMA(1,0,0)(1,1,1)[12] Q* = 11, df = 11, p-value = 0.5
Model df: 3. Total lags used: 14
tsdiag(modelo0)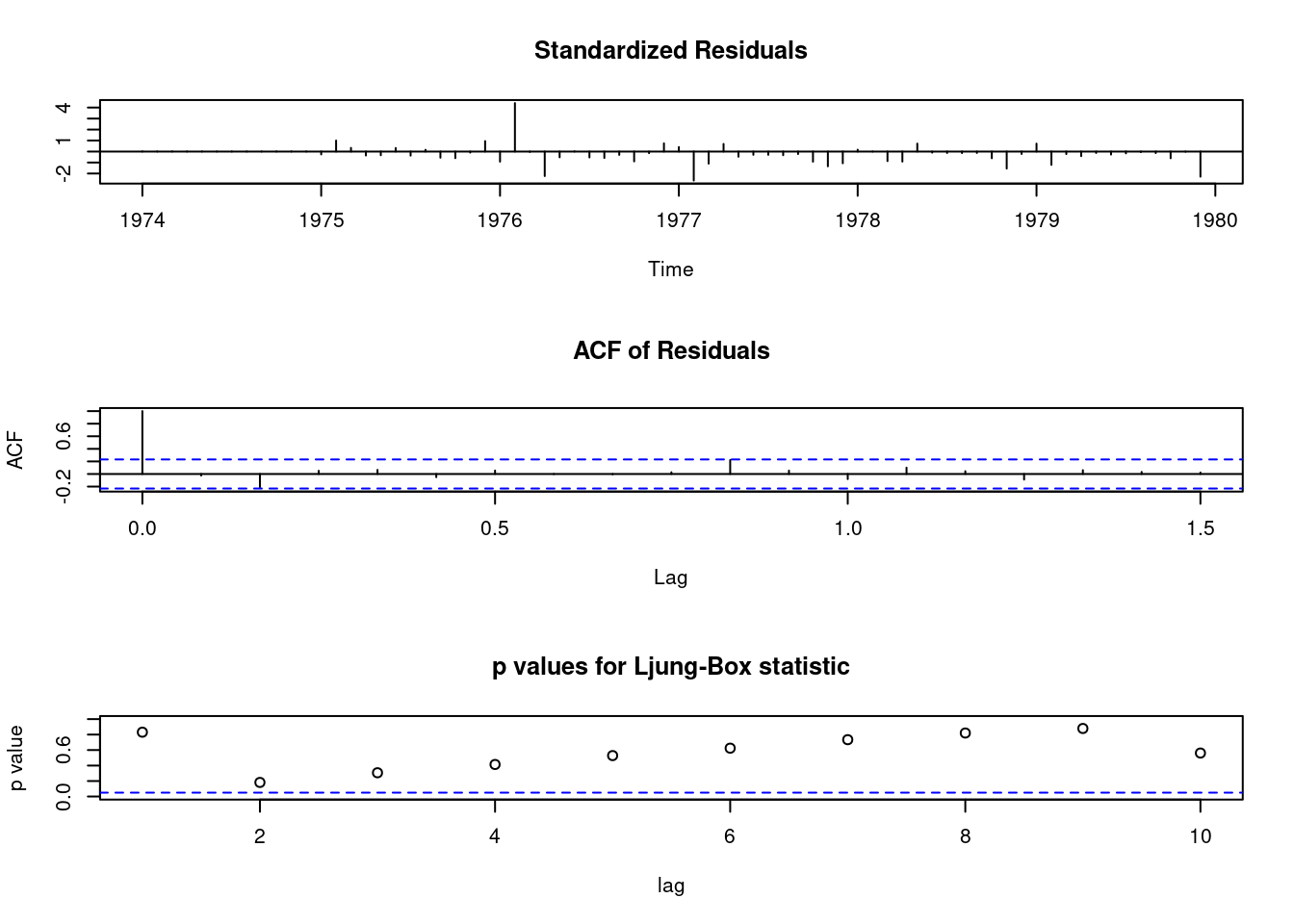
plot(ldeaths)
lines(fitted(modelo0),col="red")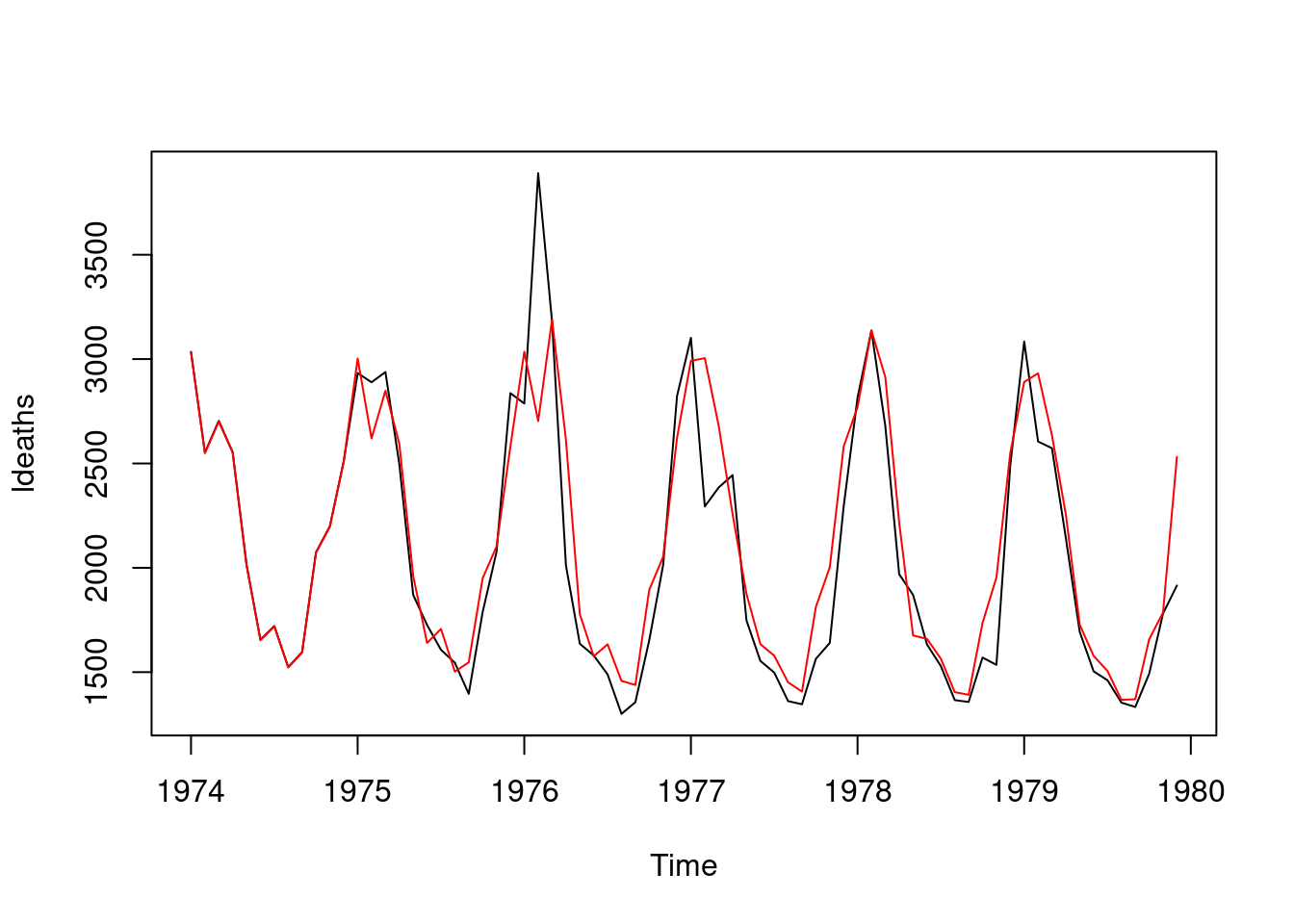
5.11 Ajuste automático de modelos ARIMA
O pacote forecast de autoria Rob Hyndman e colaboradores possui diversas funções para
visualização, análise e predições de séries temporais. Entre elas existe uma função que faz ajustes automáticos para modelos ARIMA.
Essa função se chama auto.arima().
Testa diferentes combinações de \(p\), \(d\) e \(q\) buscando o melhor ajuste
Extremamente flexível
Mesmo intuindo um modelo, você pode usá-la para confirmar sua parametrização
Alguns parâmetros importantes da função auto.arima():
stationary- Se TRUE, restringe sua busca por modelos estacionários.seasonal- Se FALSE, restringe sua busca por modelos não sazonais.stepwise- Se TRUE, utilizará o métodos de stepwise de seleção (mais rápido). Caso contrário, irá buscar todas as combinações. O método de seleção non-stepwise pode ser muito lento, especialmente para os modelos sazonais.trace- Se TRUE, a lista de modelos ARIMA considerados será reportada.approximation- Se TRUE, o processo de estimação é feito através das somas dos quadrados condicionais e os critérios de informação utilizados para a seleção de modelos são aproximados. O modelo final ainda é calculado usando estimativa de máxima verossimilhança. A aproximação deve ser usada para séries temporais longas ou um período sazonal elevado para evitar tempos de computação excessivos.
# Utilizando trace = T, será possível verificar todo o processo de criação e teste dos modelos
modelo1 <- auto.arima(ldeaths, trace = F, allowdrift=F)
# Neste modelo, será feito uma busca maior para uma solução "mais otimizada"
modelo2 <- auto.arima(ldeaths, trace = F, stepwise = F, approximation = F,parallel = TRUE)Vamos verificar cada um dos modelos obtidos:
modelo1## Series: ldeaths
## ARIMA(0,0,1)(2,1,0)[12]
##
## Coefficients:
## ma1 sar1 sar2
## 0.427 -0.860 -0.361
## s.e. 0.138 0.143 0.145
##
## sigma^2 estimated as 70422: log likelihood=-423.3
## AIC=854.6 AICc=855.3 BIC=863tsdiag(modelo1)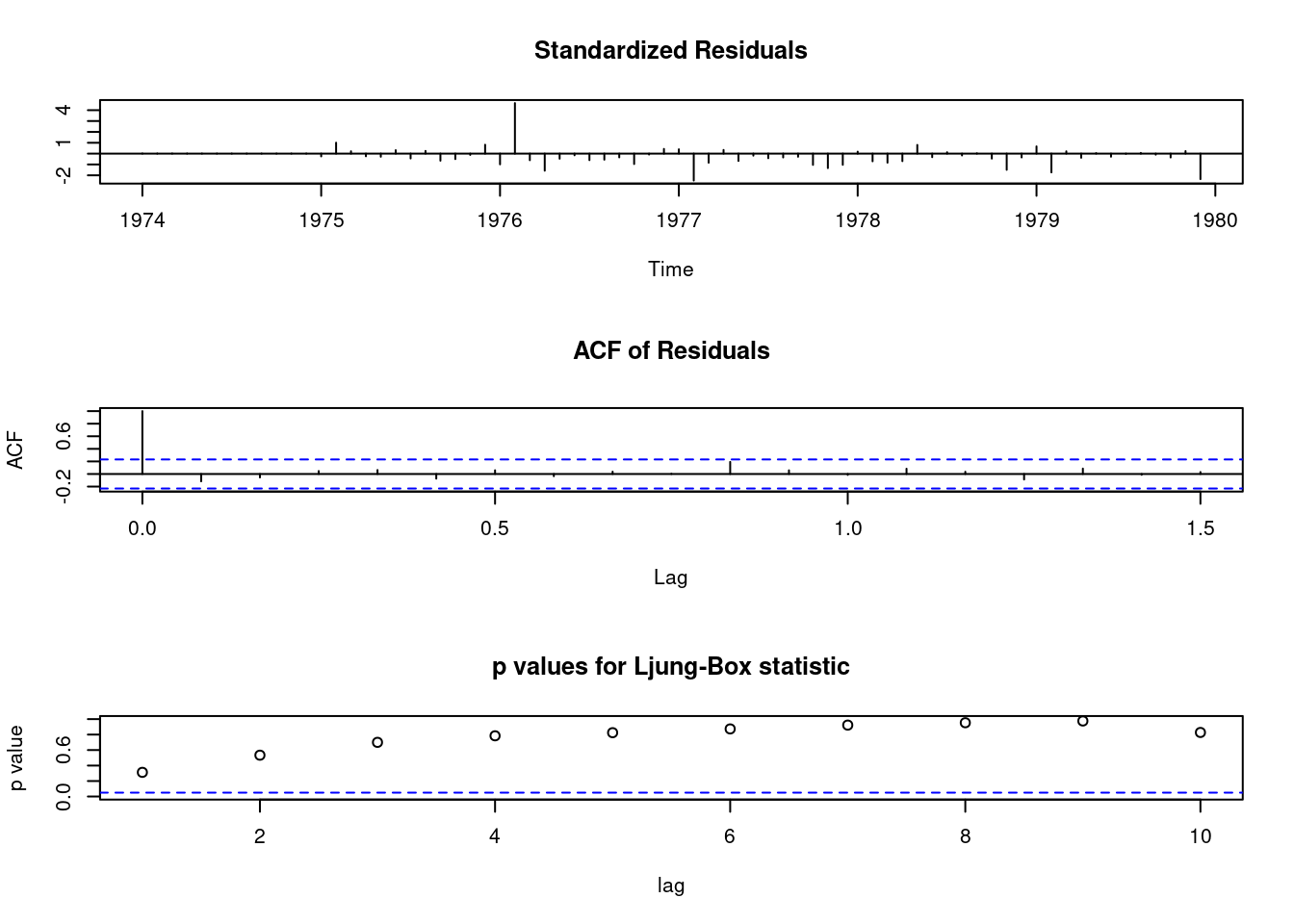
modelo2## Series: ldeaths
## ARIMA(2,0,0)(0,1,2)[12] with drift
##
## Coefficients:
## ar1 ar2 sma1 sma2 drift
## 0.255 -0.339 -1.163 0.357 -5.334
## s.e. 0.134 0.140 0.362 0.205 0.905
##
## sigma^2 estimated as 49449: log likelihood=-416.4
## AIC=844.8 AICc=846.4 BIC=857.4tsdiag(modelo2)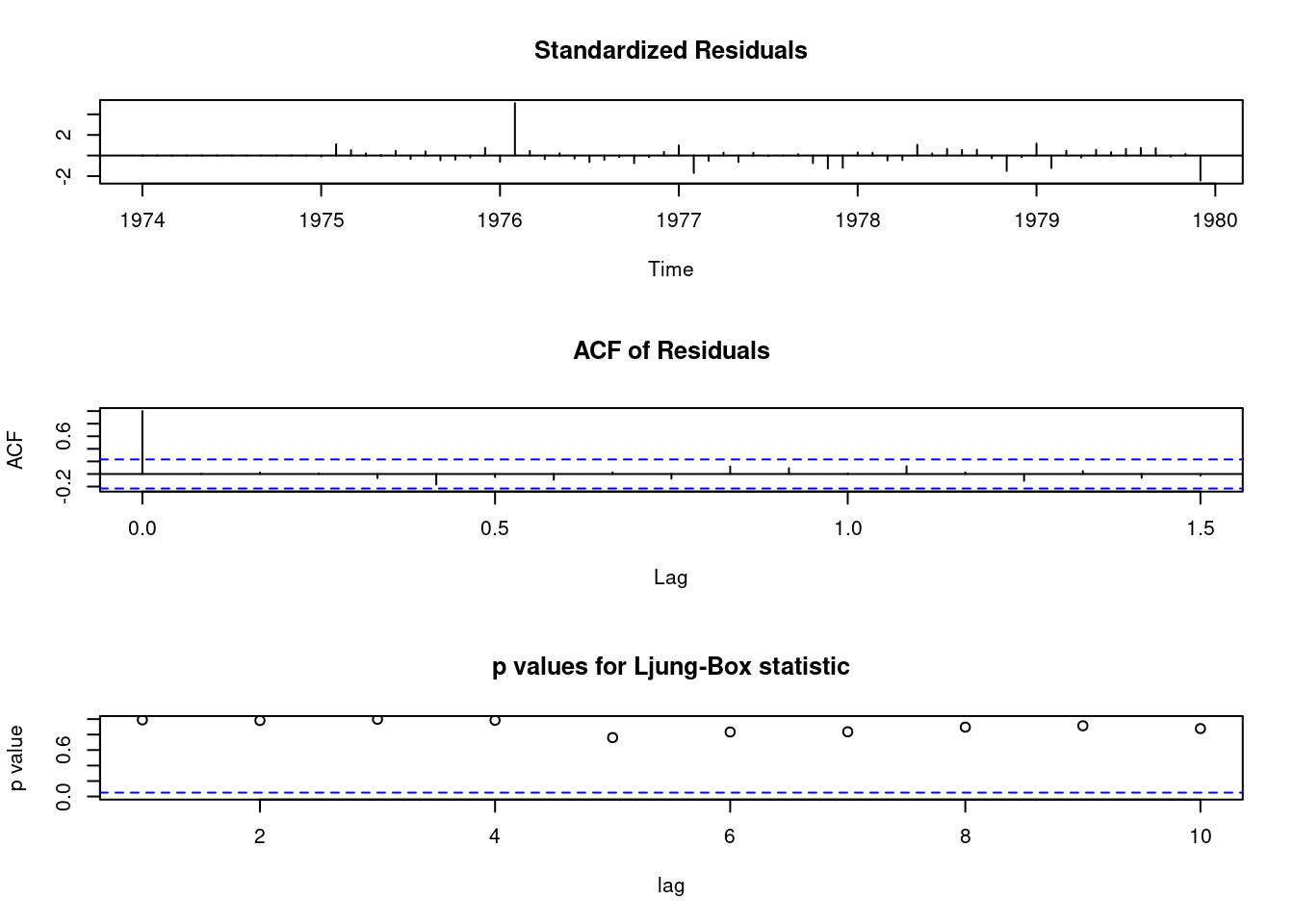
Comparando os ajustes dos modelos:
plot(ldeaths,lwd=2)
lines(fitted(modelo0),col="red",lty=2,lwd=2)
lines(fitted(modelo1),col="blue",lty=2,lwd=2)
lines(fitted(modelo2),col="orange",lty=2,lwd=2)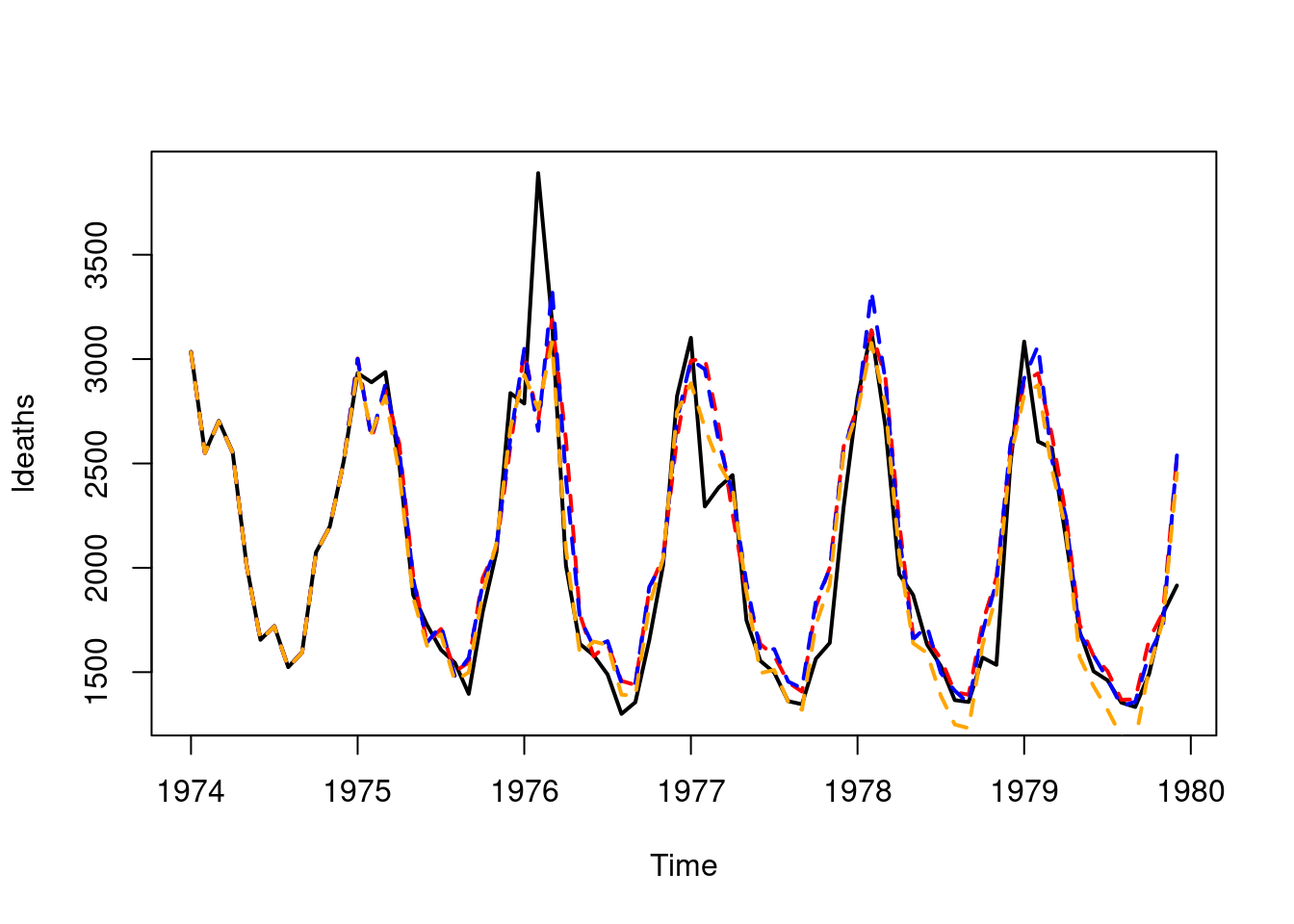
5.12 Modelos de Previsão
Uma vez ajustado um modelo ARIMA a uma série temporal é possível fazer uma predição de \(K\) passos a frente, permitindo obter a previsão da série no instante \(t + k\), denotada por \(\widehat {Z}_{t+k}\). Podemos obter também os limites de confiança.
Os modelos de previsão são uma área importante e um campo muito ativo de desenvolvimento de métodos estatísticos e computacionais. Aqui vamos somente apresentar um exemplo utilizando um dos modelos já ajustados para a serie ldeaths.
Uma maneira simples de obter o valor predito é usando a função predict().
predict(modelo1, n.ahead = 12)
O pacote forecast possui funções para facilitar a predição e visualização. Veja na função abaixo que o modelo já retorna não só o valor predito mas também os limites superior e inferior para os níveis de confiança 80 e 95.
forecast(modelo1,h=12)
Ele também facilita a confecção de gráficos.
plot(pred) # a função autoplot produz no formato ggplot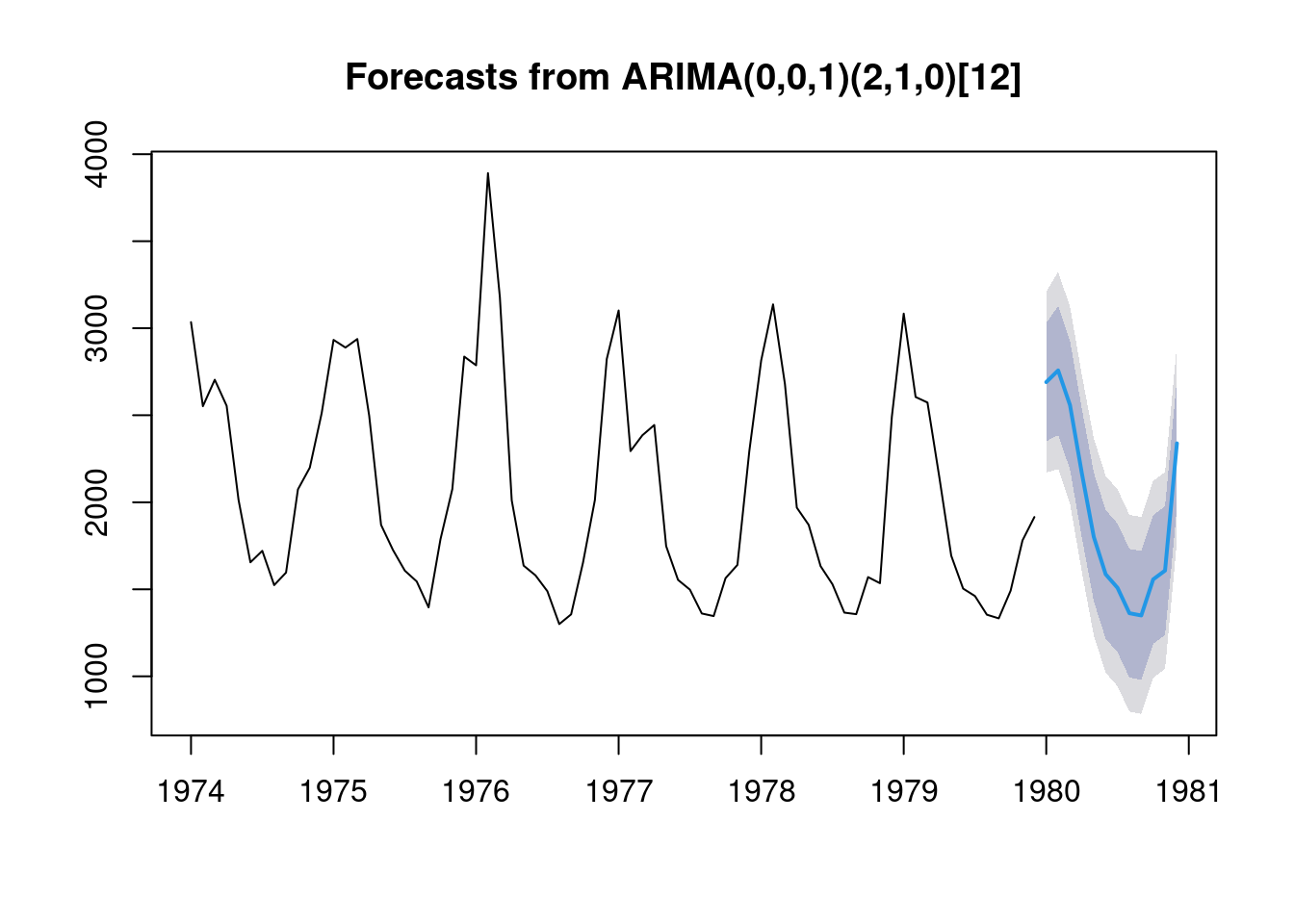
Para saber mais sobre séries temporais e previsões recomendamos o excelente livro online Forecasting: Principles and Practice Rob J Hyndman and George Athanasopoulos
5.13 Correlação Cruzada (Cross-Correlation)
Vamos considerar a situação em que temos duas ou mais séries temporais e queremos explorar as relações entre elas. A ideia seria modelar a série \(Z_{t}^{1}\) usando os pontos anteriores de \(Z_{t}^{2}\).
A correlação cruzada descreve o grau de correlação entre duas séries.
A correlação cruzada é usada para determinar quando uma mudança em um série pode potencializar a causa da mudança na outra série.
\[Z_{t} = v(B) X_t + N_t\] para a qual:
\(v(B)\) é a função de transferência (filtro)
\(Z_t,X_t\) são séries estacionarias
\(N_t\) é um ruído independente de \(X_t\)
Vamos analisar:
O atraso de uma série em relação a outra
O feedback
Correlação dos resíduos, removida a estrutura temporal
A título de demonstração da função de correlação cruzada (Cross-correlation Function), vamos usar como exemplo dados de temperatura da área central do Reino Unido, obtidos do UK Met Office e vamos correlacionar com a série ldeaths .
uktemp <- read.table('https://gitlab.procc.fiocruz.br/oswaldo/eco2019/raw/master/dados/UKtemp.tsv')
uktemp <- ts(as.vector(t(uktemp[,2:13])),start = c(1970,1),frequency = 12)
uktemp.ts <- window(uktemp,start=c(1974,1),end=c(1979,12))
fcc <- ccf(uktemp.ts,ldeaths)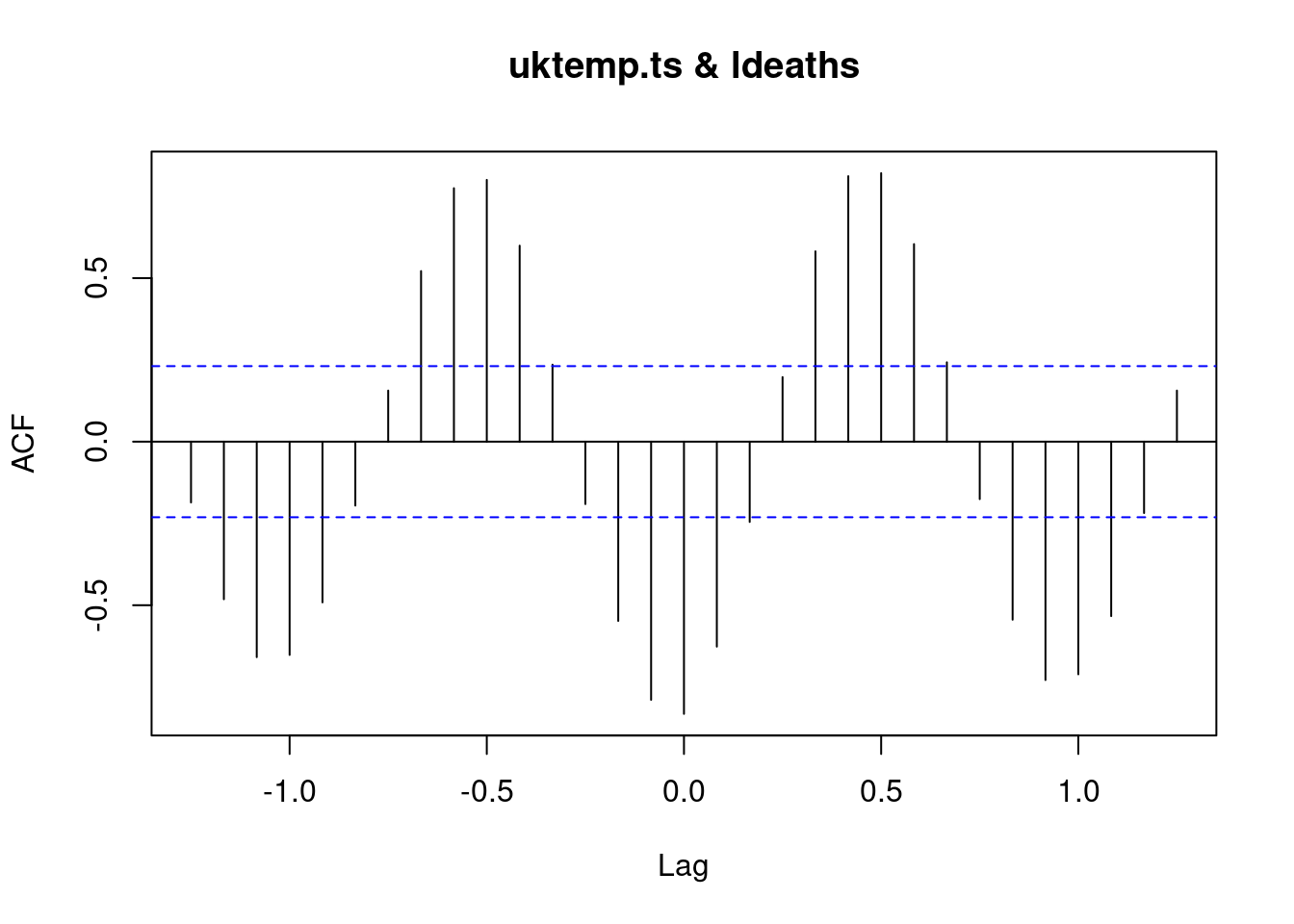
cbind(fcc$lag,fcc$acf)| -1.2500 | -0.1859 |
| -1.1667 | -0.4816 |
| -1.0833 | -0.6586 |
| -1.0000 | -0.6518 |
| -0.9167 | -0.4912 |
| -0.8333 | -0.1953 |
| -0.7500 | 0.1562 |
| -0.6667 | 0.5214 |
| -0.5833 | 0.7748 |
| -0.5000 | 0.8002 |
| -0.4167 | 0.5991 |
| -0.3333 | 0.2354 |
| -0.2500 | -0.1907 |
| -0.1667 | -0.5479 |
| -0.0833 | -0.7891 |
| 0.0000 | -0.8320 |
| 0.0833 | -0.6264 |
| 0.1667 | -0.2453 |
| 0.2500 | 0.1974 |
| 0.3333 | 0.5818 |
| 0.4167 | 0.8115 |
| 0.5000 | 0.8207 |
| 0.5833 | 0.6039 |
| 0.6667 | 0.2426 |
| 0.7500 | -0.1756 |
| 0.8333 | -0.5441 |
| 0.9167 | -0.7285 |
| 1.0000 | -0.7110 |
| 1.0833 | -0.5332 |
| 1.1667 | -0.2181 |
| 1.2500 | 0.1562 |
max(abs(fcc$acf))## [1] 0.8325.14 GAM (Generalized Additive Models)
- Um modelo aditivo generalizado (Hastie and Tibishirani, 1990) é um modelo linear generalizado com um preditor linear envolvendo a soma de funções suavizadas das covariáveis + os efeitos fixos das mesmas.
\[\eta = \sum X \beta + f_1(x_{1i}) + f_2(x_{2i}) + \ldots\]
Pode ser considerado uma extensão do GLM, onde o preditor linear \(\eta = E(Y_i)\) não é limitado para a regressão linear, sendo \(Y_i \sim\) alguma distribuição da família exponencial.
\(Y_i\) é a variável resposta (desfecho)
\(X\) é o vetor das variáveis explicativas (exposição)
\(\beta\) representa o vetor de parâmetros a serem estimados pelo modelo.
O modelo inclui qualquer função das covariáveis independentes (\(x_i\))
\(f(x)\) pode ser uma função não-paramétrica, cuja forma não é especificada a priori. Mas pode ser estimada através de curvas de alisamento (ex: kernel, loess, splines, etc.)
A curva alisada permite descrever a forma e revelar possíveis não linearidades nas relações estudadas, uma vez que não apresenta a estrutura rígida de uma função paramétrica, como nos GLM’s.
Quando usar? Quando o efeito da covariável muda dependendo do seu valor.
5.14.1 Tipos de splines
Cubic regression spline – polinômios de grau 3 ajustados aos intervalos dos dados definidos pelos nós distribuı́dos regularmente em todo o escopo dos dados. A base é a soma de nós mais 2, que correspondem ao início e fim da curva. Os polinômios são unidos de forma a existir as 1 e 2 derivadas.
Cyclic cubic regression spline – força a função a ter o mesmo valor e mesmas derivadas no início e final. Interessante para séries temporais com sazonalidade.
P-splines – Baseia-se na B-spline, na qual a função vai obrigatoriamente a zero em m+3 nós adjacentes. A p-spline se baseia nessa, porém aplica uma penalidade diferencial entre β’s adjacentes para controlar a “wiggliness”.
Thin plate – menor erro quadrático, menor número de parâmetros considerado o estimador ótimo. Facilmente adaptável para duas/três dimensões.
Tensor Product – Semelhante ao Thin Plate, mas permite escalas
| bs= | Descrição | Vantagens | Desvantagens |
|---|---|---|---|
| “tp” | Thin Plate | Suaviza múltiplas covariáveis. Não se altera com a rotação. Estimador ótimo. | Computacionalmente custoso. Não é invariante quanto à escala. |
| “cr” | Cubic Regression | Computacionalmente barato. Parâmetros interpretáveis diretamente. | Só uma covariável. Baseado na escolha dos nós. Estimador não ótimo. |
| “cc” | Cyclic CRS | Começo e fim = ’s | Idem. |
| “ps” | P-splines | Qualquer combinação de base e ordem. | Nós em intervalos iguais. Penalidades difíceis de interpretar. Estimador não ótimo. |
5.14.2 Por que não usar ?
Os modelos estatísticos visam explicar os dados observados, não simplesmente reproduzi-lo \(\rightarrow\) overfitting
Modelos paramétricos em geral são melhores para estimar erros padrão ou intervalos de confiança
Modelos paramétricos são mais eficientes, se corretamente especificados (menor número de observações)
5.14.3 GAM em Séries Temporais
A idéia principal é modelar o efeito de covariáveis em alguns eventos de saúde ao longo do tempo
Razões:
Permitir a inclusão da dependência do tempo
Relação não-linear
Tendência e sazonalidade podem ser facilmente incorporadas
Considerando a variável resposta uma contagem, as escolhas para as distribuições são:
Poisson: \(\lambda\) \(=\) valores esperados e \(=\) variância \(\rightarrow\) superdispersão
Quasipoisson: não é uma distribuição, mas uma maneira de relaxar suposição do modelo anterior e levar em consideração a superdispersão. (Não estima o AIC automaticamente).
Negative Binomial: tem uma média \(\mu\), um parâmetro de escala \(\theta\) e a variância como a função \(V(\mu)=\mu+\mu^2/\theta\)
Modelos com inflação zero: modelos de mistura que combinam uma massa pontual a zero com uma distribuição de contagem como Poisson, geométrica ou binomial negativa
5.14.4 Exemplo de modelo GAM aplicado a ST ldeaths
Transforma o exemplo ldeaths de ts em data.frame preservando as estruturas temporais (tempo e mês)
ldeaths.df <- data.frame(tempo=time(ldeaths),obitos=ldeaths,mes=cycle(ldeaths))
ldeaths.df| tempo | obitos | mes |
|---|---|---|
| 1974 | 3035 | 1 |
| 1974 | 2552 | 2 |
| 1974 | 2704 | 3 |
| 1974 | 2554 | 4 |
| 1974 | 2014 | 5 |
| 1974 | 1655 | 6 |
Modelando como GAM:
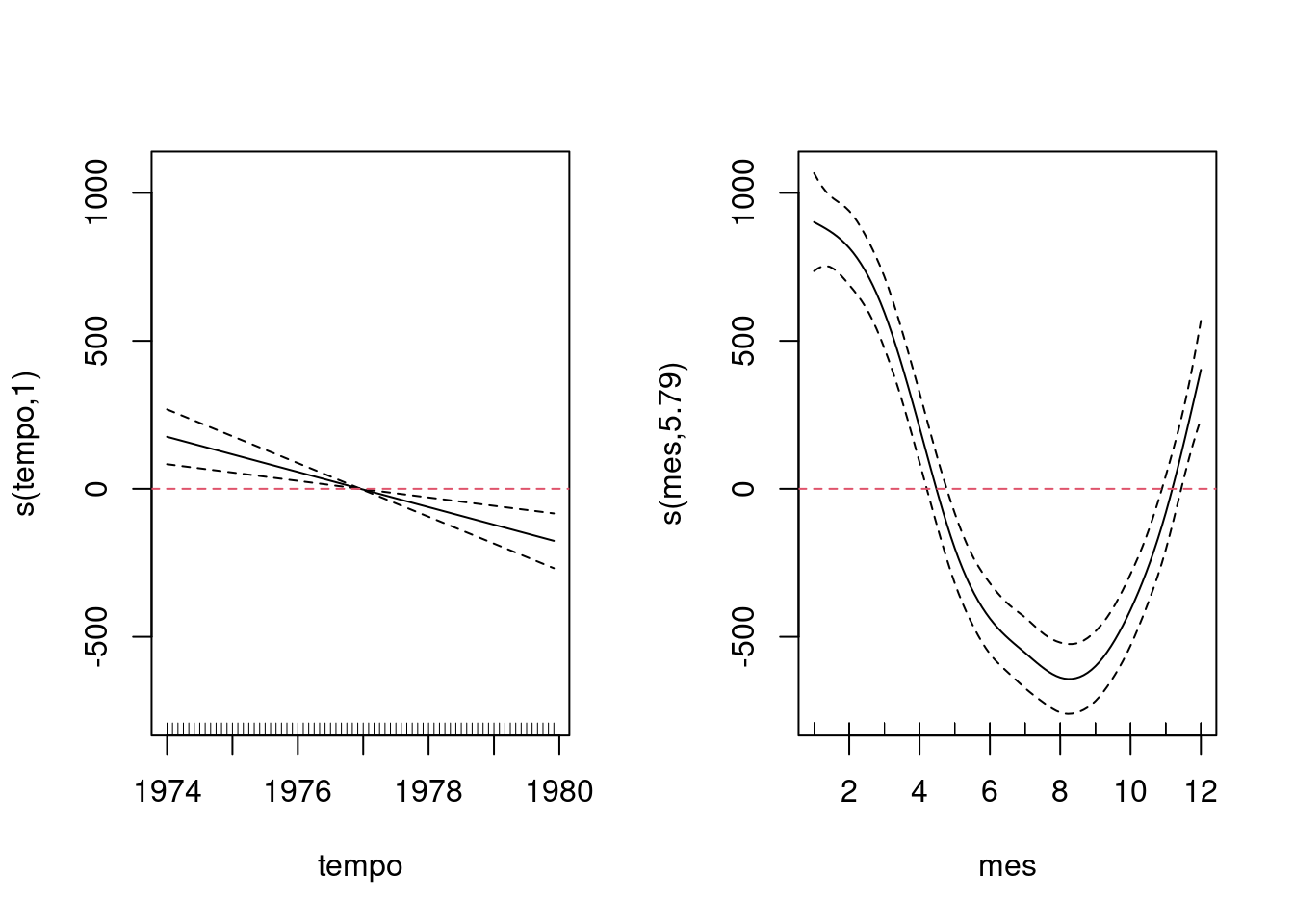
mod0 <- gam ( obitos ~ s(tempo) + s(mes),data=ldeaths.df)
mod0Sumário do modelo
R-quadrado(ajustado) = 0.86 Deviance Explicada = 0.88 AIC = 995.27
Gráfico dos termos suaves:
Análise de resíduos
Vamos verificar se sobraram estruturas nos resíduos usando a ACF dos resíduos e o teste de Ljung-Box:
acf(residuals(mod0))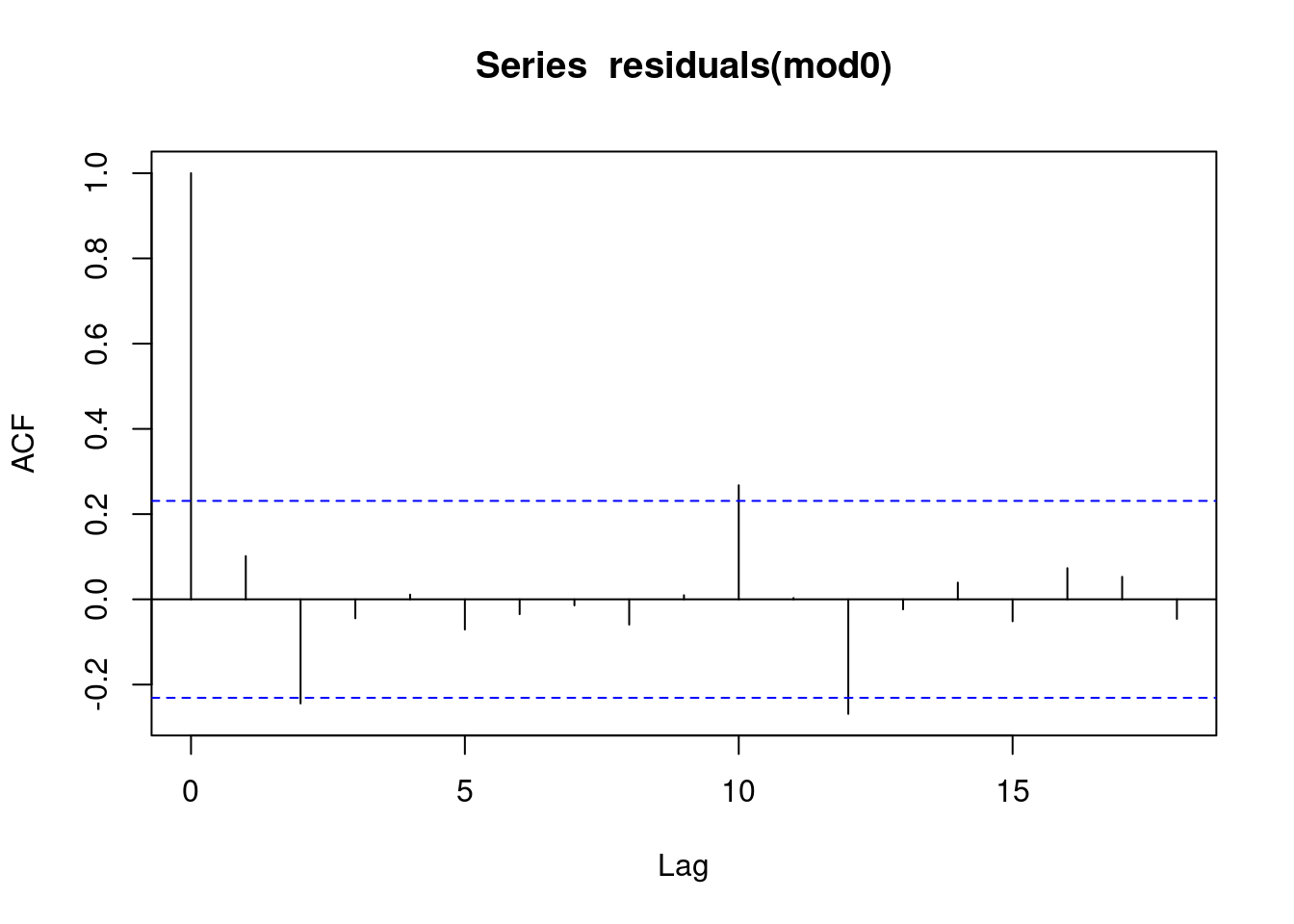
Box.test(residuals(mod0),type='Ljung-Box')| Test statistic | df | P value |
|---|---|---|
| 0.7716 | 1 | 0.3797 |
Como podemos observar a variável tempo que captura a tendência ficou completamente linear.
Vamos agora usar a variavel tempo de forma linear no modelo.
mod1 <- gam ( obitos ~ tempo + s(mes),data=ldeaths.df)
mod1R-quadrado(ajustado) = 0.86 Deviance Explicada =0.87 AIC = 994.67
acf(residuals(mod1))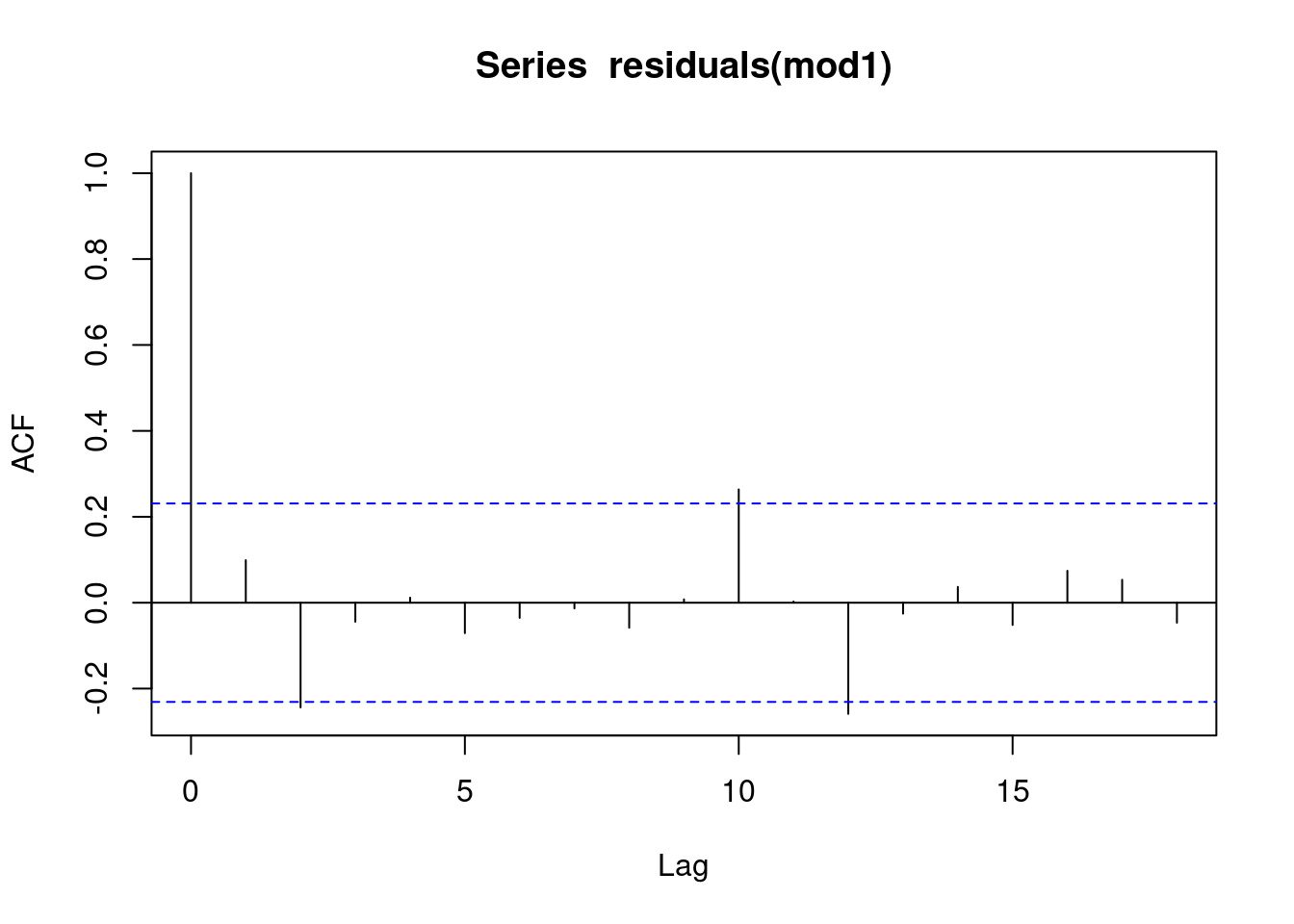
Box.test(residuals(mod1),type='Ljung-Box')| Test statistic | df | P value |
|---|---|---|
| 0.7346 | 1 | 0.3914 |
5.14.5 Exemplo GAM: Casos de Leptospirose vs Clima
- Vamos utilizar uma a série temporal dos casos de leptospirose com as variáveis de esposição total de chuva e temperatura.
\[\text{Lepto}(t) = \text{rain}(t-?) + \text{humidity}(t-?) + AR(t,t-1) + trend + seasonality + \varepsilon\]
Tendência e Sazonalidade \(\to\) função suavizadora
Covariáveis \(\to\) lag no tempo
É possível incluir a variabilidade populacional em risco (offset)
lepto <- read.csv2("https://gitlab.procc.fiocruz.br/oswaldo/eco2019/raw/master/dados/leptoruido.csv", header=T)
dia <- read.table("https://gitlab.procc.fiocruz.br/oswaldo/eco2019/raw/master/dados/climadia.dat", header=T)
library(lattice)
library(car)
library(sm)
library(survival)
library(mgcv)
#XY condicionado
xyplot(cases + totrain + tempmed ~ week,
outer=TRUE, layout=c(1, 3), pch=1, type="l",ylab="",
scales=list(x=list(relation='same'), y=list(relation='free')),
data=lepto)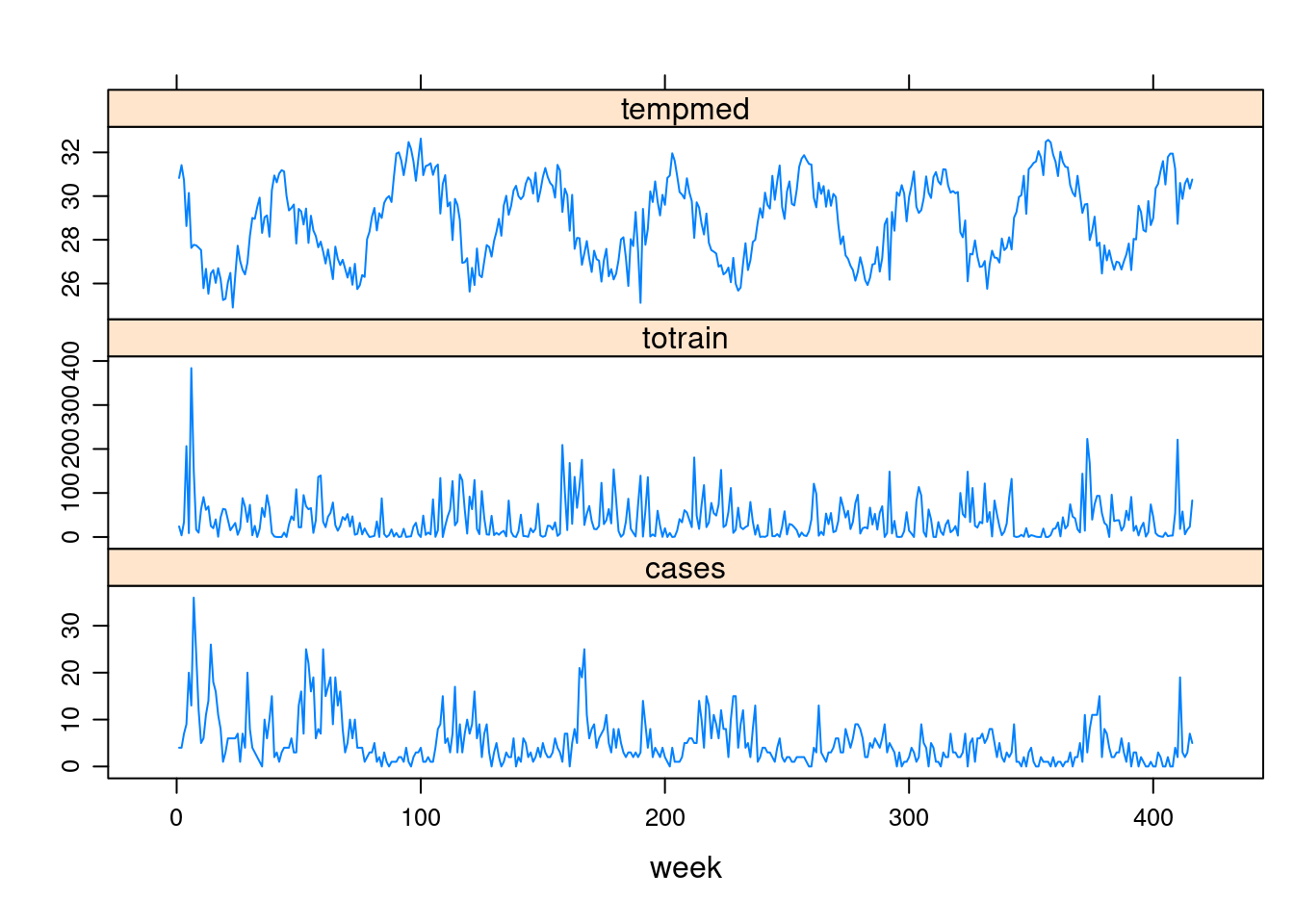
- Modelando a Chuva como resposta e colocando a função suavizadora para capturar o efeito nas semanas epidemológicas
xyplot(totrain ~ week,
outer=TRUE, layout=c(1, 1), pch=1, type="l",ylab="Chuva",
scales=list(x=list(relation='same'), y=list(relation='free')),
data=lepto)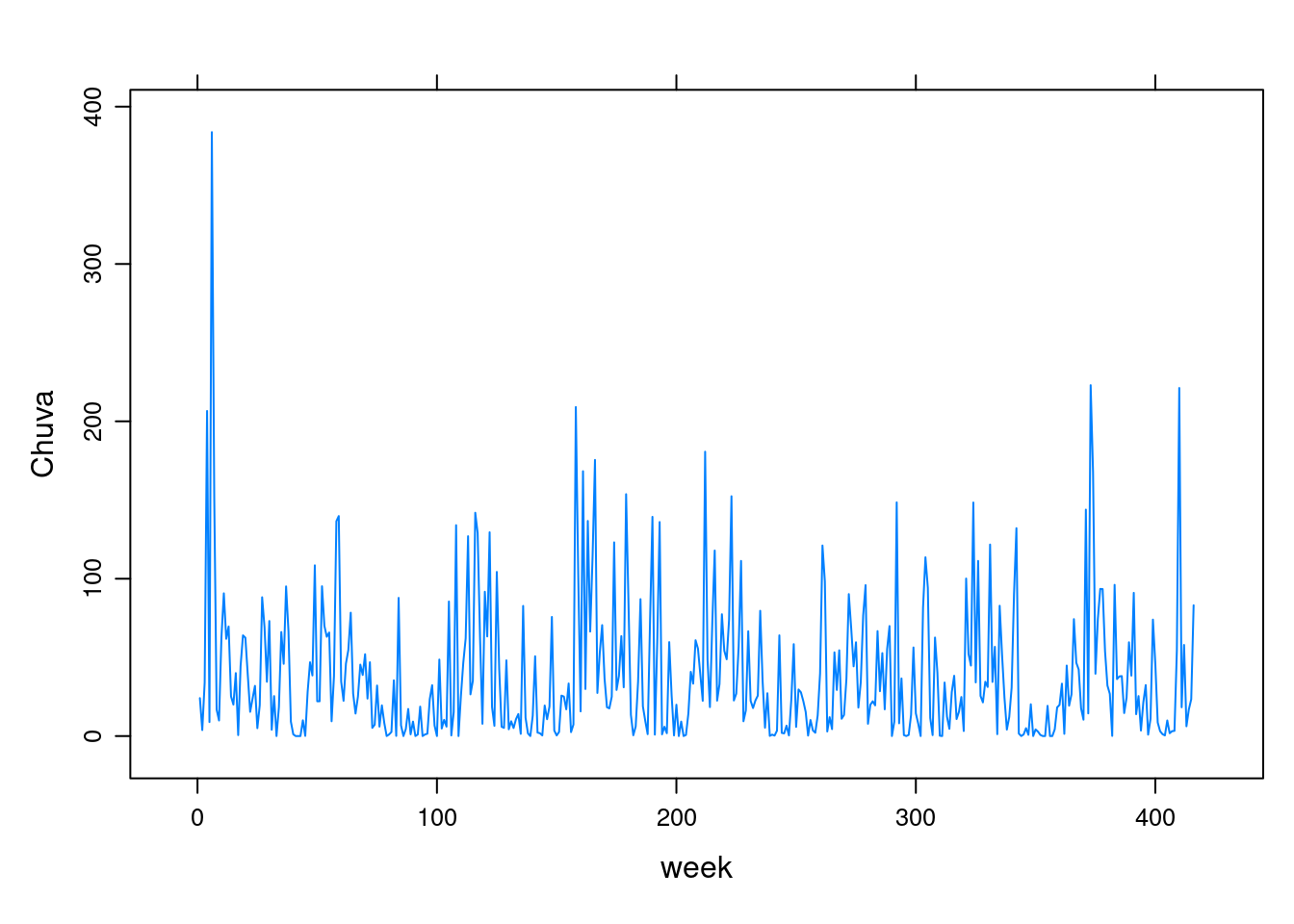
# Ajustando a chuva como resposta
par(mfrow=c(2,2))
rain.tp.auto <- gam(totrain ~ s(week,bs="tp"), data=lepto )
plot(rain.tp.auto,main=paste('K = ',rain.tp.auto$smooth[[1]]$bs.dim))
rain.tp.k1 <- gam(totrain ~ s(week,bs="tp",k=1), data=lepto )
plot(rain.tp.k1,main = paste('K =',rain.tp.k1$smooth[[1]]$bs.dim))
rain.tp.k30 <- gam(totrain ~ s(week,bs="tp",k=30), data=lepto )
plot(rain.tp.k30,main=paste('K =',rain.tp.k30$smooth[[1]]$bs.dim))
rain.ad <- gam(totrain ~ s(week,bs="ad"), data=lepto )
plot(rain.ad,main=paste('K(adaptável) =', rain.ad$smooth[[1]]$bs.dim))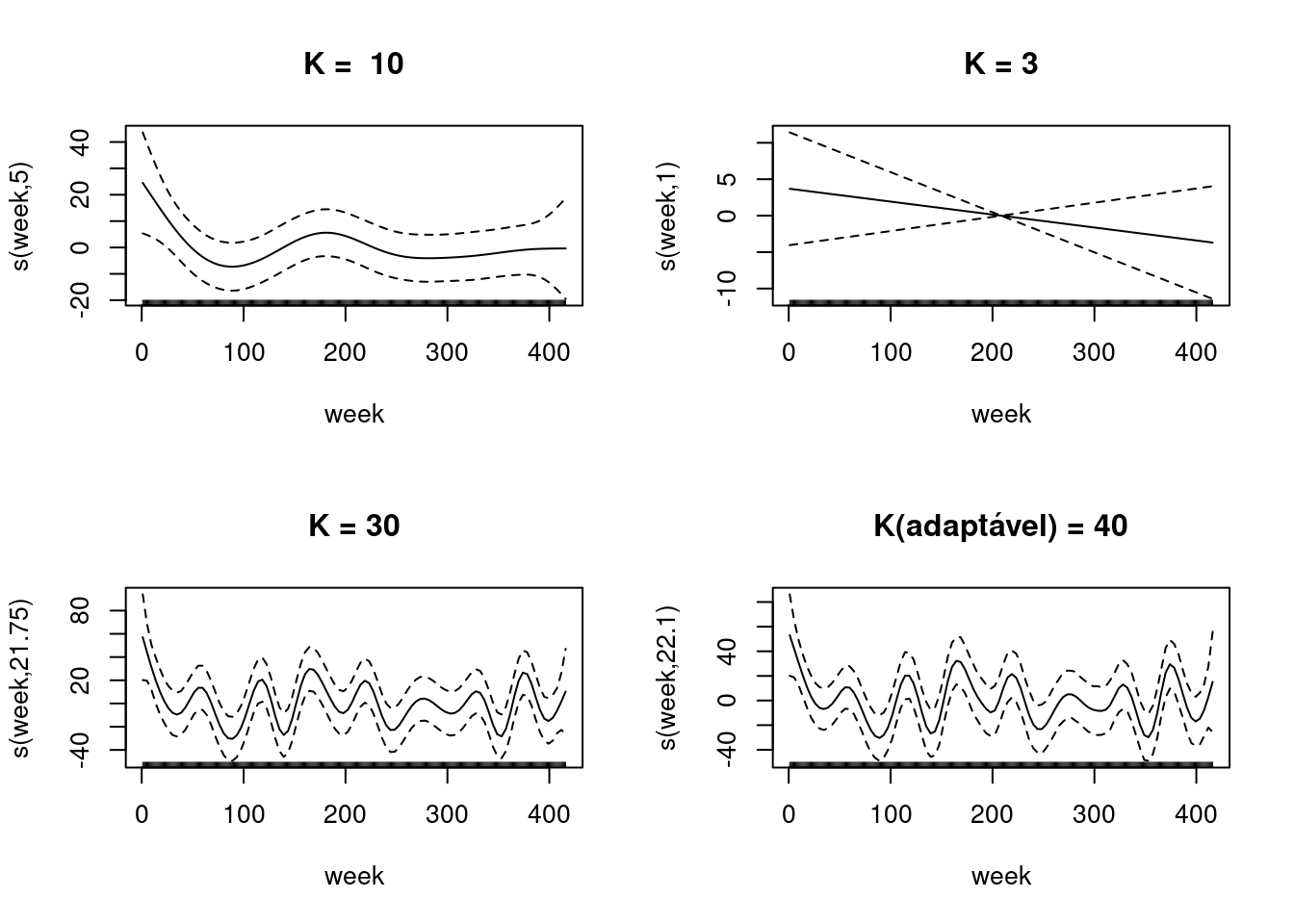
# ThinPlate <- predict(rain.tp)
# P.spline <- predict(rain.ps)
# CubicRegression <- predict(rain.cr)
# CyclicCR <- predict(rain.cc)
# Adaptative <- predict(rain.ad)- Ajustando a série dos casos de leptospirose via distribuição Poisson:
library(quantmod) # para utilizar a funcao Lag
chuvl0 <- gam(cases ~ s(totrain) ,family=poisson,data=subset(lepto, week>5))
chuvl1 <- gam(cases ~ s(Lag(totrain,1)),family=poisson,data=subset(lepto, week>5))
chuvl2 <- gam(cases ~ s(Lag(totrain,2)),family=poisson,data=subset(lepto, week>5))
chuvl3 <- gam(cases ~ s(Lag(totrain,3)),family=poisson,data=subset(lepto, week>5))
chuvl4 <- gam(cases ~ s(Lag(totrain,4)),family=poisson,data=subset(lepto, week>5))
chuvl5 <- gam(cases ~ s(Lag(totrain,5)),family=poisson,data=subset(lepto, week>5))AIC(chuvl0,chuvl1,chuvl2,chuvl3,chuvl4,chuvl5)- Ajustando a série dos casos de leptospirose via distribuição Binomial Negativa
chuvnb0 <- gam(cases ~ s(Lag(totrain,0)),data=lepto, family=nb(), subset=week>5)
chuvnb1 <- gam(cases ~ s(Lag(totrain,1)),data=lepto, family=nb(), subset=week>5)
chuvnb2 <- gam(cases ~ s(Lag(totrain,2)),data=lepto, family=nb(), subset=week>5)
chuvnb3 <- gam(cases ~ s(Lag(totrain,3)),data=lepto, family=nb(), subset=week>5)
chuvnb4 <- gam(cases ~ s(Lag(totrain,4)),data=lepto, family=nb(), subset=week>5)
chuvnb5 <- gam(cases ~ s(Lag(totrain,5)),data=lepto, family=nb(), subset=week>5)
chuvnb5$family$getTheta()[1] 0.4864
AIC(chuvnb0,chuvnb1,chuvnb2,chuvnb3,chuvnb4,chuvnb5)- Comparando os AIC’s de ambos os modelos entre os lags
plot(0:5,AIC(chuvl0,chuvl1,chuvl2,chuvl3,chuvl4,chuvl5)[,2], type="l",ylim=c(2090,2850), ylab="AIC's", xlab = "Lags")
lines(0:5,AIC(chuvnb0,chuvnb1,chuvnb2,chuvnb3,chuvnb4,chuvnb5)[,2], type="l",col=2)
legend("right",c("Poisson","Bin. Neg."),col=1:2,fill=1:2)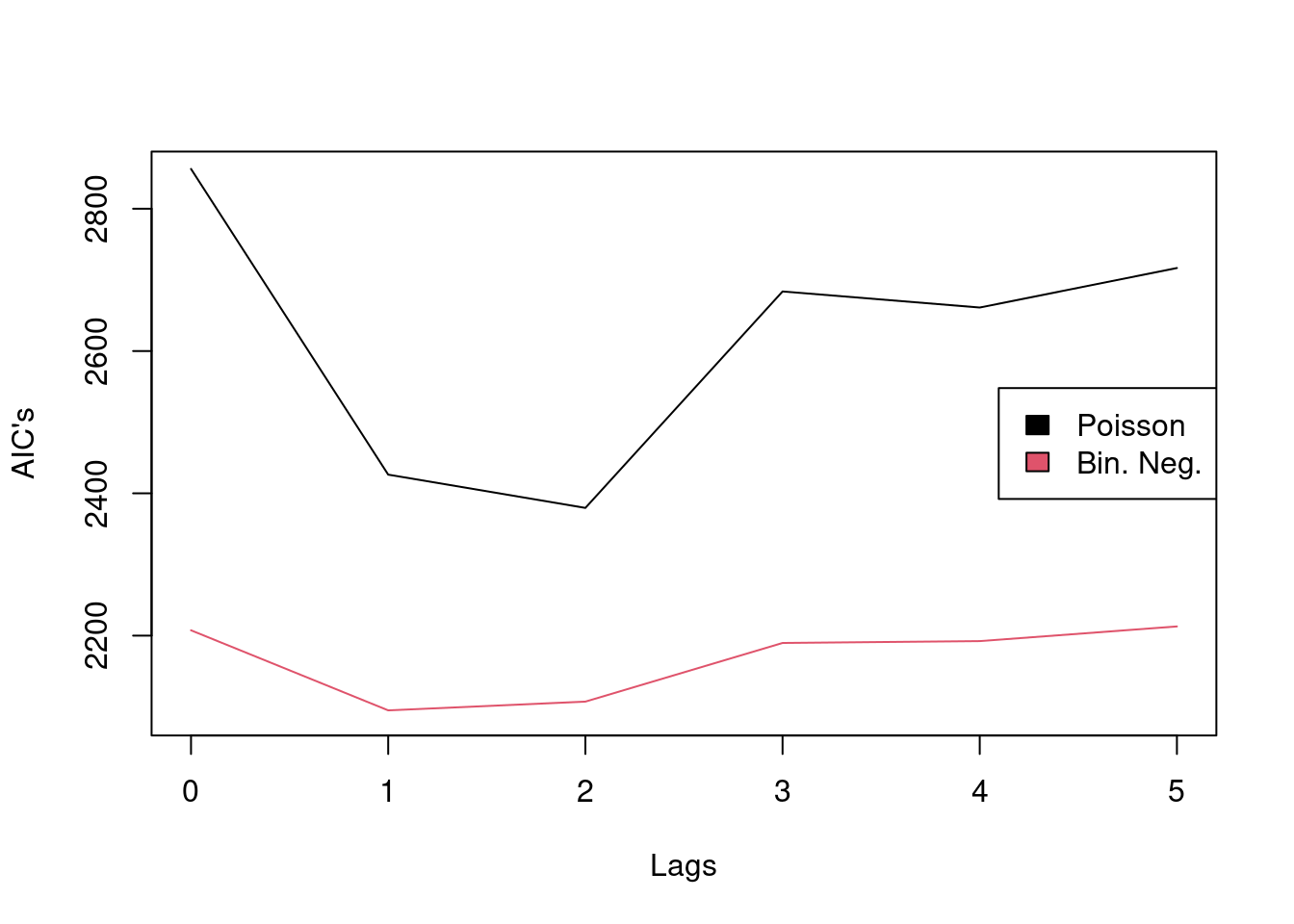
- Verificando a distribuição da chuva entre todos os lags
boxplot(lepto$totrain)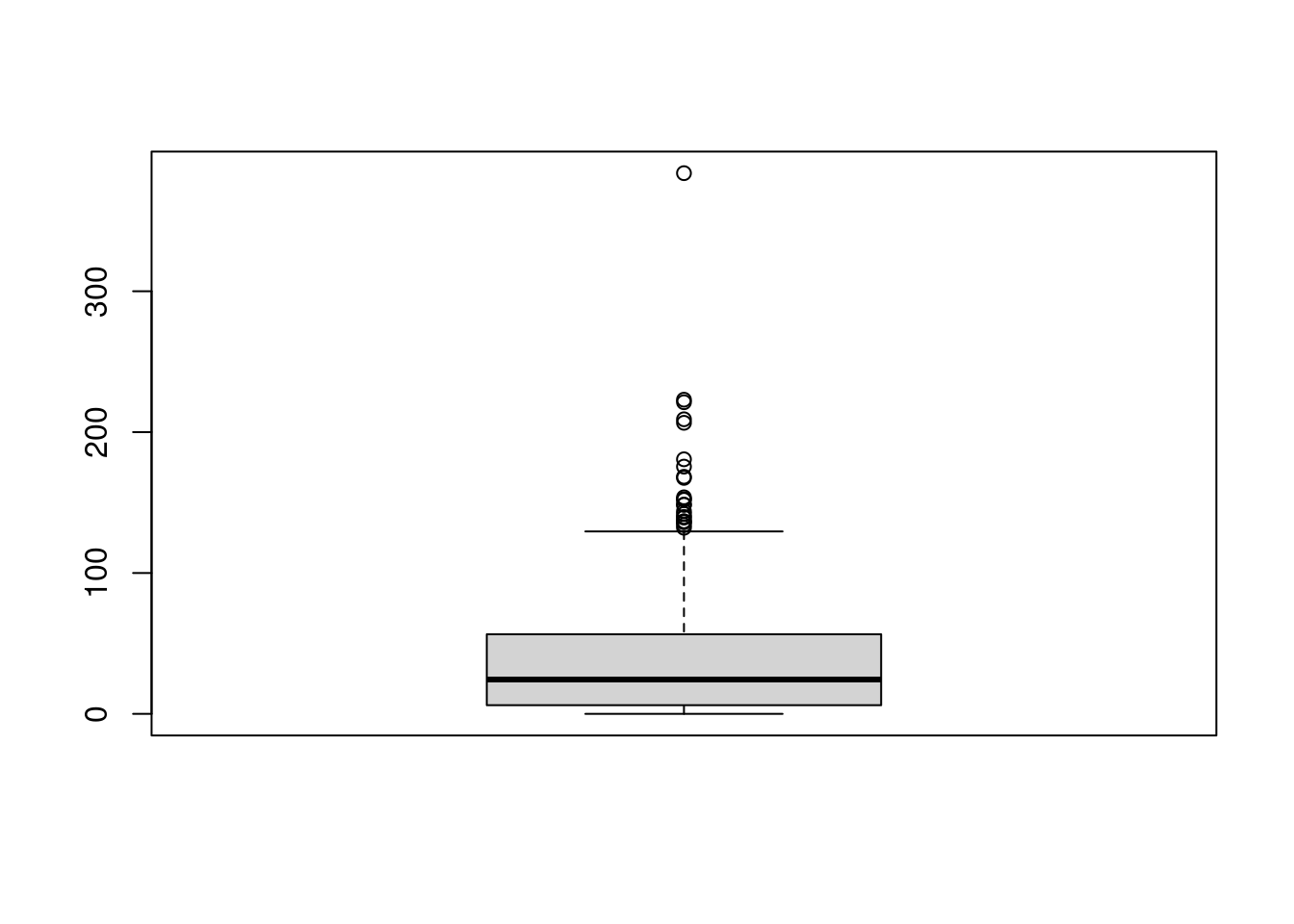
par(mfrow=c(3,2),mai=c(0.05,0.5412 ,0.5412,0.05),mgp=c(2,1,0))
plot(chuvnb0,ylab="Lag=0")
abline(h=0,lty=2,col=2)
plot(chuvnb1,ylab="Lag=1")
abline(h=0,lty=2,col=2)
plot(chuvnb2,ylab="Lag=2")
abline(h=0,lty=2,col=2)
plot(chuvnb3,ylab="Lag=3")
abline(h=0,lty=2,col=2)
plot(chuvnb4,ylab="Lag=4")
abline(h=0,lty=2,col=2)
plot(chuvnb5,ylab="Lag=5")
abline(h=0,lty=2,col=2)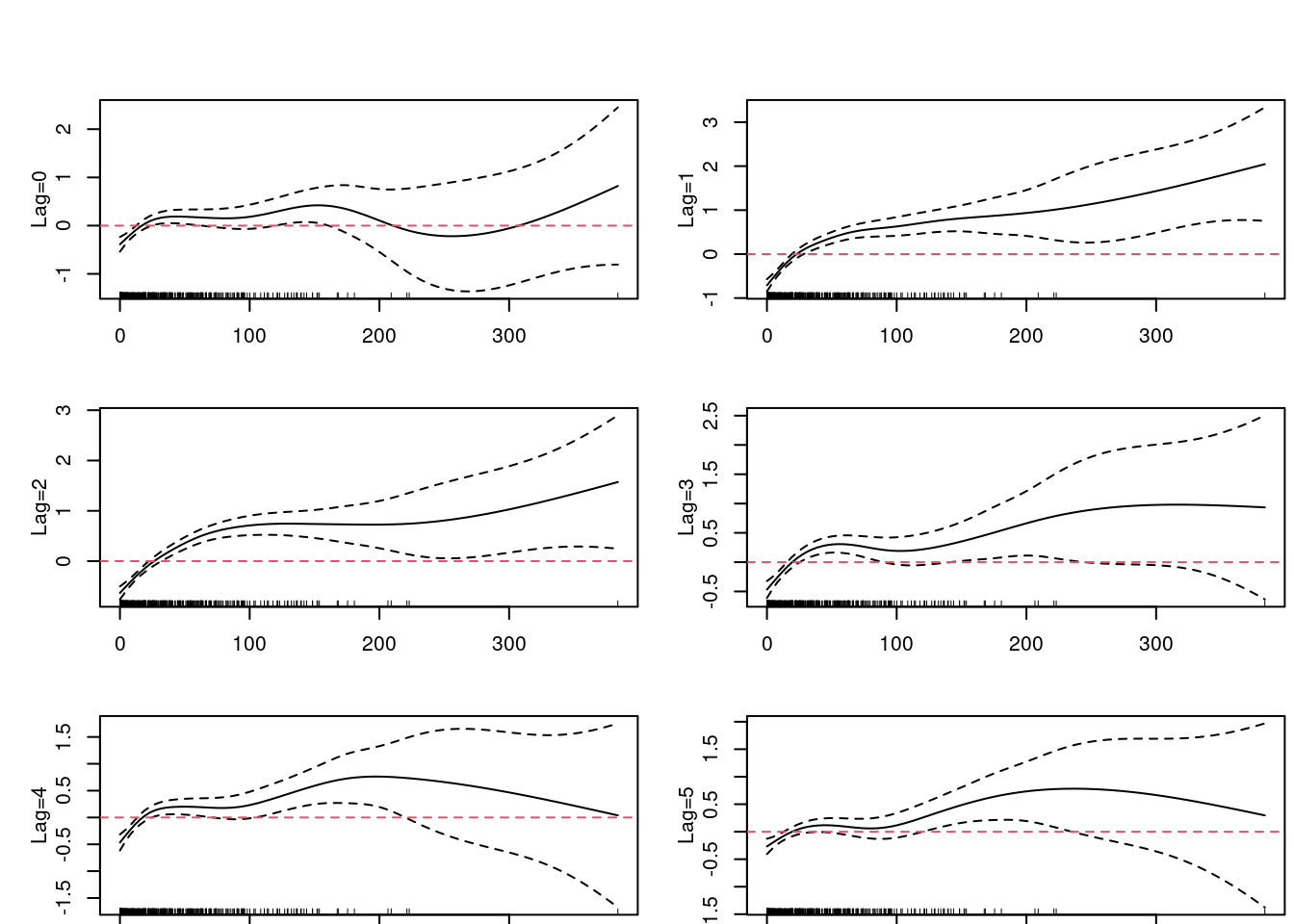
- E agora? incluir humidade, temperatura, etc etc…
5.15 Exercícios Propostos
- Utilize o banco de dados do R chamado Seatbelts, que é baseado em uma série histórica que mostra os totais mensais dos condutores de automóveis na Grã-Bretanha mortos ou gravemente feridos, de 1969 a dezembro de 1984. O uso obrigatório dos cintos de segurança foi introduzido em 31 de janeiro de 1983.
| Variáveis | Descrição |
|---|---|
| DriversKilled | Motoristas de carro mortos |
| drivers | Motoristas |
| front | Passageiros do banco da frente mortos ou gravemente feridos |
| rear | Passageiros do banco traseiro mortos ou gravemente feridos |
| kms | Distância percorrida |
| PetroPrice | Preço da gasolina |
| VanKilled | Número de condutores de van (veículo leve de mercadorias) |
| law | A lei estava em vigor naquele mês (1/0) |
Pede-se:
- Ajuste um modelo ARIMA com a variável de desfecho DriversKilled;
- Ajuste um modelo GAM utilizando a variável de desfecho DriversKilled e verifique quais variáveis estão mais associadas ao modelo.
- Dados climatológicos de temperaturas máxima, mínima e pluviosidade para as 10 áreas de planejamento (AP) da cidade do Rio de Janeiro de 2001 a 2016 estão disponíveis nos arquivos abaixo. Use a função read.csv2 para ler o dado.
Escolha uma delas, descreva a série e tente modelar usando os modelos B&J ou GAM.
5.15.1 Exercícios Resolvidos
5.16 Bibliografia sugerida
Asteriou, D.; Hall, S.G. Applied econometrics. Macmillan International Higher Education, 2015.
Brockwell, Peter J.; DAVIS, Richard A.; CALDER, Matthew V. Introduction to time series and forecasting. New York: springer, 2002.
Harvey, A. C. and Durbin, J. The effects of seat belt legislation on British road casualties: A case study in structural time series modelling. Journal of the Royal Statistical Society series A, 149, 187–227. 1986.
Hastie, T.; Tibshirani, R. Generalised Additive Models. Chapman & Hall, 1990.
Hyndman, R. J. and Khandakar, Y. Automatic time series forecasting: The forecast package for R, Journal of Statistical Software, 26(3). 2008.
Hyndman, R. J. and Athanasopoulos, G. Forecasting: Principles and Practice 3rd edition.
Webster, C.E.J. Time series properties of econometric models and their implied ARIMA representation. 1983.
Wood, S.N. Generalized Additive Models: An Introduction with R. Chapman & Hall/CRC Texts in Statistical Science Series, 2006.